
Kiến thức trắc địa
Giải quyết các lỗi thường gặp khi sử dụng bộ thu GNSS
Giải quyết lỗi là cơ bản đối với hiệu suất của bộ thu GNSS. Cách một nhà sản xuất phát triển bộ thu, bao gồm cả các yếu tố thiết kế phần cứng và phần mềm, ảnh hưởng trực tiếp đến hiệu quả của việc giải quyết lỗi. Máy thu có thể loại bỏ càng nhiều lỗi thì mức độ chính xác và độ tin cậy của định vị càng cao.
Kỹ thuật lý tưởng để sửa lỗi là gì? Thực sự không có “cách tốt nhất”, vì tất cả phụ thuộc vào hiệu suất định vị mà ứng dụng người dùng cuối yêu cầu. Ví dụ, sử dụng bộ thu GNSS trong điện thoại di động của bạn để tìm ra rằng nhà hàng mới không yêu cầu mức hiệu suất tương tự như hạ cánh máy bay trực thăng không người lái trên một nền tảng đang di chuyển.
Có sự cân bằng giữa các phương pháp khác nhau để loại bỏ lỗi trong tín hiệu GNSS. Các phương pháp được sử dụng phụ thuộc vào các yêu cầu riêng của từng ứng dụng như mức độ chính xác, độ phức tạp của hệ thống, tính khả dụng của giải pháp, độ tin cậy và chi phí.
Trong Chương 2, chúng tôi đã giới thiệu các khái niệm cơ bản về định vị GNSS, cụ thể là khi chúng áp dụng cho định vị điểm đơn, trong đó một bộ thu GNSS hoạt động riêng lẻ, hoặc “độc lập”, để xác định vị trí và thời gian của nó. Trong chương này, chúng tôi giới thiệu các phương pháp mà máy thu GNSS cải thiện hiệu suất bằng cách sử dụng các kỹ thuật tiên tiến hơn để giảm thiểu hoặc loại bỏ các sai số trong phép tính vị trí. Về cơ bản, định vị GNSS bắt đầu bằng công thức toán học đơn giản là: Vận tốc = Khoảng cách ÷ Thời gian. Do đó, các yếu tố ảnh hưởng đến khoảng cách đến vệ tinh hoặc thời gian để tín hiệu vệ tinh đến anten cần phải được giải quyết.
May mắn thay, một số người rất thông minh đã phát triển các kỹ thuật để giải quyết lỗi. Nói chung, các kỹ thuật này có thể được mô tả như sau:
A. Tính trung bình của các quan sát lặp lại tại cùng một vị trí (phương pháp kém hiệu quả nhất).
B. Mô hình hóa hiện tượng gây ra lỗi và dự đoán các giá trị sửa chữa.
C. Hiệu chỉnh sai lệch (DGNSS).
Trong chương này, chúng ta sẽ xem xét một số kỹ thuật hiệu chỉnh, cách chúng hoạt động và một số lợi ích và thách thức của mỗi phương pháp. Nhưng trước tiên chúng ta hãy xem xét các khái niệm về phép đo GNSS đa chòm sao / đa tần số và mã so với pha sóng mang và tác động của chúng đối với việc giải quyết lỗi và hiệu suất định vị.
Đa chòm sao và đa tần số
Đa chòm sao, đa tần số
Khả năng của bộ thu GNSS để xử lý nhiều tần số từ nhiều chòm sao trong việc tính toán vị trí là điều cần thiết để giải quyết lỗi tối ưu.
Đa tần số
Sử dụng máy thu đa tần là cách hiệu quả nhất để loại bỏ sai số tầng điện ly khỏi tính toán vị trí. Sai số tầng điện ly thay đổi theo tần số nên nó tác động khác nhau đến các tín hiệu GNSS khác nhau. Ví dụ, bằng cách so sánh độ trễ của hai tín hiệu GNSS, L1 và L2, bộ thu có thể sửa chữa ảnh hưởng của lỗi tầng điện ly.
Các tín hiệu băng rộng mới và được hiện đại hóa trong băng tần L5 / E5a cung cấp khả năng giảm thiểu nhiễu và đa đường truyền vốn có. Khi máy thu kết hợp khả năng L5 / E5a với khả năng loại bỏ lỗi tầng điện ly bằng cách sử dụng tần số kép, có thể đạt được những cải tiến đáng kể về cả độ chính xác đo lường và định vị.
Máy thu đa tần số cũng cung cấp khả năng chống nhiễu tốt hơn. Nếu có nhiễu trong dải tần L2 xung quanh 1227 MHz, máy thu đa tần sẽ vẫn theo dõi các tín hiệu L1 và L5 để đảm bảo định vị liên tục.
Đa Chòm sao
Như đã mô tả trước đây, một máy thu nhiều chòm sao có thể truy cập tín hiệu từ một số chòm sao: chẳng hạn như GPS, GLONASS, BeiDou và Galileo. Việc sử dụng các chòm sao khác ngoài GPS, dẫn đến việc có một số lượng lớn hơn các vệ tinh trong trường quan sát, mang lại những lợi ích sau:
- Giảm thời gian thu nhận tín hiệu.
- Cải thiện độ chính xác về vị trí và thời gian.
- Giảm các vấn đề do các vật cản như tòa nhà và tán lá gây ra.
- Cải thiện sự phân bố trong không gian của các vệ tinh khả kiến, dẫn đến cải thiện độ pha loãng của độ chính xác.
Khi bộ thu sử dụng tín hiệu từ nhiều chòm sao khác nhau, giải pháp dự phòng sẽ được tích hợp sẵn. Nếu một tín hiệu bị chặn do môi trường làm việc, có khả năng rất cao là người nhận có thể chỉ cần lấy tín hiệu từ một chòm sao khác — đảm bảo tính liên tục của giải pháp. Trong khi cực kỳ hiếm, nếu một hệ thống GNSS bị lỗi, vẫn có những hệ thống khác.
Để xác định vị trí ở chế độ chỉ có GPS, bộ thu phải theo dõi tối thiểu bốn vệ tinh. Ở chế độ nhiều chòm sao, bộ thu phải theo dõi năm vệ tinh, ít nhất một trong số đó phải từ một vệ tinh ở chòm sao khác, để bộ thu có thể xác định thời gian lệch giữa các chòm sao.
Phép đo GNSS
Phép đo GNSS – Độ chính xác pha của mã và sóng mang

Kỹ thuật định vị được mô tả trong Chương 2 được gọi là kỹ thuật dựa trên mã vì máy thu tương quan và sử dụng các mã Pseudorandom Noise (PRN) được truyền bởi bốn hoặc nhiều vệ tinh để xác định vị trí và thời gian của nó. Điều này dẫn đến độ chính xác định vị là vài mét. Đối với một số ứng dụng, chẳng hạn như khảo sát, yêu cầu độ chính xác cao hơn. Các kỹ thuật dựa trên sóng mang như Động học thời gian thực (RTK) và Định vị điểm chính xác (PPP) đã được phát triển để có thể cung cấp các vị trí có mức độ chính xác cao hơn GNSS dựa trên mã.
A. Điều chế pha của sóng mang sử dụng mã PRN được sử dụng để phân biệt các tín hiệu vệ tinh và cung cấp thông tin định thời tín hiệu cho các phép đo phạm vi.
B. Các phép đo dựa trên điều chế PRN không rõ ràng, nhưng độ chính xác bị giới hạn ở mét phụ.
C. Sóng mang đối với tín hiệu GNSS là sóng hình sin với chu kỳ nhỏ hơn một mét (19 cm đối với L1), cho phép thực hiện các phép đo chính xác hơn.
D. Các phép đo pha của sóng mang có thể được thực hiện chính xác đến từng milimet, nhưng phép đo không rõ ràng vì tổng số chu kỳ giữa vệ tinh và máy thu không xác định.
Giải quyết hoặc ước tính sự không rõ ràng về pha sóng mang là chìa khóa để đạt được định vị chính xác với RTK hoặc PPP. Hai phương pháp sử dụng các kỹ thuật khác nhau để đạt được điều này nhưng cả hai đều sử dụng:
- Ước tính vị trí Pseudorange (dựa trên mã).
- Giảm thiểu sai số định vị, bằng cách sử dụng dữ liệu định vị hoặc hiệu chỉnh tương đối.
- Quan sát nhiều tín hiệu vệ tinh để tìm các thuật ngữ không rõ ràng phù hợp nhất với dữ liệu đo lường.
Do đó, phương pháp được sử dụng bởi máy thu, mã hoặc các phép đo dựa trên sóng mang sẽ ảnh hưởng đến hiệu suất định vị.
GNSS khác biệt
Một kỹ thuật thường được sử dụng để cải thiện hiệu suất GNSS là GNSS vi sai, được minh họa trong Hình 40.
Trong GNSS vi phân, vị trí của một máy thu GNSS cố định, được gọi là trạm gốc, được xác định với độ chính xác cao bằng các kỹ thuật khảo sát thông thường. Sau đó, trạm gốc xác định phạm vi đối với các vệ tinh GNSS đang xem bằng cách sử dụng:
- Kỹ thuật định vị dựa trên mã được mô tả trong Chương 2.
- Vị trí của các vệ tinh được xác định dựa trên quỹ đạo chính xác và thời gian của vệ tinh.
Trạm gốc so sánh vị trí đã khảo sát với vị trí được tính toán từ các dãy vệ tinh. Sự khác biệt giữa các vị trí có thể là do thiên văn vệ tinh và sai số đồng hồ, nhưng chủ yếu là do sai số liên quan đến độ trễ khí quyển. Trạm gốc sẽ gửi các lỗi này đến các máy thu khác (máy thu), trạm này kết hợp các hiệu chỉnh vào tính toán vị trí của chúng.
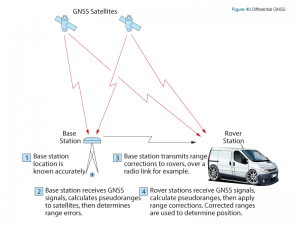
Định vị chênh lệch yêu cầu liên kết dữ liệu giữa trạm gốc và máy dò, nếu các hiệu chỉnh cần được áp dụng trong thời gian thực và ít nhất bốn vệ tinh GNSS ở cả trạm gốc và máy dò. Độ chính xác tuyệt đối của vị trí được tính toán của máy dò sẽ phụ thuộc vào độ chính xác tuyệt đối của vị trí của trạm gốc.
Vì vệ tinh GNSS quay quanh trái đất ở trên cao, nên các đường truyền từ vệ tinh đến trạm gốc và trạm điều khiển đi qua các điều kiện khí quyển tương tự, miễn là trạm gốc và trạm thu không quá xa nhau. GNSS khác biệt hoạt động rất tốt với các khoảng cách từ cơ sở đến động cơ lên đến hàng chục km.
Hệ thống tăng cường dựa trên vệ tinh
Đối với các ứng dụng mà chi phí của một hệ thống GNSS vi sai là không hợp lý, hoặc nếu các trạm di động nằm trên một khu vực quá lớn, thì Hệ thống tăng cường dựa trên vệ tinh (SBAS) có thể thích hợp hơn để nâng cao độ chính xác của vị trí.
Hệ thống SBAS là hệ thống vệ tinh không đồng bộ địa lý cung cấp các dịch vụ cải thiện độ chính xác, tính toàn vẹn và tính khả dụng của các tín hiệu GNSS cơ bản.
- Độ chính xác được nâng cao thông qua việc truyền tải các hiệu chỉnh trên diện rộng đối với các lỗi trong phạm vi GNSS.
- Tính toàn vẹn được tăng cường bởi mạng SBAS nhanh chóng phát hiện ra các lỗi tín hiệu vệ tinh và gửi cảnh báo đến người nhận rằng họ không nên theo dõi vệ tinh bị lỗi.
- Tính khả dụng của tín hiệu có thể được cải thiện nếu SBAS truyền các tín hiệu khác nhau từ các vệ tinh của nó. Hệ thống SBAS bao gồm các trạm tham chiếu, trạm chủ, trạm đường lên và vệ tinh không đồng bộ địa lý, như trong Hình 41.
Các trạm tham chiếu, được phân bố theo địa lý trên toàn vùng dịch vụ SBAS, nhận các tín hiệu GNSS và chuyển tiếp chúng đến trạm chủ. Vì vị trí của các trạm tham chiếu được biết chính xác, nên trạm chủ có thể tính toán chính xác các hiệu chỉnh trên diện rộng.
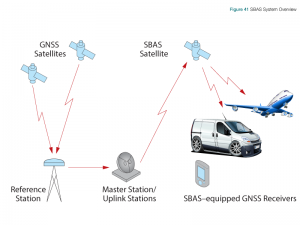
Các hiệu chỉnh được liên kết lên vệ tinh SBAS sau đó phát tới các máy thu GNSS trên toàn vùng phủ sóng SBAS.
Thiết bị của người dùng nhận các hiệu chỉnh và áp dụng chúng vào các phép tính phạm vi.
Các phần sau đây cung cấp tổng quan về một số dịch vụ SBAS đã được triển khai trên khắp thế giới hoặc đã được lên kế hoạch.
Hệ thống tăng cường diện rộng (WAAS)
Cục Hàng không Liên bang Hoa Kỳ (FAA) đã phát triển Hệ thống tăng cường diện rộng (WAAS) để cung cấp hiệu chỉnh GPS và mức độ toàn vẹn được chứng nhận cho ngành hàng không, cho phép máy bay tiếp cận chính xác các sân bay. Các bản sửa lỗi cũng được cung cấp miễn phí cho người dùng dân sự ở Bắc Mỹ.
Trạm tổng thể diện rộng (WMS) nhận dữ liệu GPS từ các trạm tham chiếu diện rộng (WRS) trên khắp Hoa Kỳ. WMS tính toán các hiệu chỉnh khác biệt sau đó liên kết các vệ tinh này với hai vệ tinh địa tĩnh WAAS để phát sóng trên toàn nước Mỹ.
Các hiệu chỉnh riêng biệt được tính toán cho độ trễ tầng điện ly, thời gian vệ tinh và quỹ đạo vệ tinh, cho phép các hiệu chỉnh lỗi được ứng dụng người dùng xử lý riêng, nếu thích hợp.
WAAS phát dữ liệu hiệu chỉnh trên cùng một tần số với GPS, cho phép sử dụng cùng một thiết bị thu và ăng ten như được sử dụng cho GPS. Để nhận dữ liệu hiệu chỉnh, thiết bị của người dùng phải có đường ngắm tới một trong các vệ tinh WAAS.
Dịch vụ lớp phủ điều hướng địa lý tĩnh của Châu Âu (EGNOS)
Cơ quan Vũ trụ Châu Âu, hợp tác với Ủy ban Châu Âu (EC) và EUROCONTROL (Tổ chức Châu Âu về An toàn Điều hướng Hàng không) đã phát triển Dịch vụ Lớp phủ Điều hướng Địa tĩnh Châu Âu (EGNOS), một hệ thống nâng cao giúp cải thiện độ chính xác của các vị trí lấy từ GPS tín hiệu và cảnh báo người dùng về độ tin cậy của tín hiệu GPS.
Ba vệ tinh EGNOS bao phủ các quốc gia thành viên Liên minh châu Âu và một số quốc gia khác ở châu Âu. EGNOS truyền dữ liệu hiệu chỉnh vi sai cho mục đích sử dụng công cộng và đã được chứng nhận cho các ứng dụng an toàn trong cuộc sống. Các vệ tinh EGNOS cũng đã được đặt ở phía đông Đại Tây Dương, Ấn Độ Dương và giữa lục địa Châu Phi.
Hệ thống điều hướng tăng cường dựa trên vệ tinh MTSAT (MSAS)
MSAS là một SBAS cung cấp dịch vụ nâng cấp cho Nhật Bản. Nó sử dụng hai vệ tinh vận tải đa chức năng (MTSAT) và mạng lưới các trạm mặt đất để tăng cường tín hiệu GPS ở Nhật Bản.
Hệ thống định vị tăng cường GEO được hỗ trợ bởi GPS (GAGAN)
GAGAN là SBAS hỗ trợ điều hướng chuyến bay trên không phận Ấn Độ. Hệ thống này dựa trên ba vệ tinh địa tĩnh, 15 trạm tham chiếu được lắp đặt trên khắp Ấn Độ, ba trạm đường lên và hai trung tâm điều khiển. GAGAN tương thích với các hệ thống SBAS khác, chẳng hạn như WAAS, EGNOS và MSAS.
Hệ thống giám sát và hiệu chỉnh sai lệch (SDCM)
Liên bang Nga đang phát triển SDCM để cung cấp cho Nga các cải tiến về độ chính xác và giám sát tính toàn vẹn cho cả hệ thống định vị GLONASS và GPS. Đến năm 2016, Liên bang Nga có kế hoạch cung cấp vùng phủ sóng L1 SBAS cho toàn bộ lãnh thổ Nga và đến năm 2018 vùng phủ sóng L1 / L5. SDCM cũng sẽ cung cấp dịch vụ Định vị Điểm Chính xác (PPP) cho L1 / L3 GLONASS vào năm 2018.
Các hệ thống SBAS khác
Trung Quốc đang lên kế hoạch SNAS (Hệ thống tăng cường điều hướng vệ tinh), để cung cấp dịch vụ giống như WAAS cho khu vực Trung Quốc.
Hệ thống tăng cường dựa trên mặt đất
Hệ thống tăng cường dựa trên mặt đất (GBAS) cung cấp các hiệu chỉnh khác biệt và giám sát tính toàn vẹn của vệ tinh cho các máy thu sử dụng liên kết vô tuyến VHF. Còn được gọi là Hệ thống tăng cường khu vực cục bộ (LAAS), GBAS bao gồm một số ăng-ten GNSS được đặt tại các vị trí đã biết, một hệ thống điều khiển trung tâm và một máy phát vô tuyến VHF.
GBAS bao phủ một khu vực tương đối nhỏ (theo tiêu chuẩn GNSS) và được sử dụng cho các ứng dụng đòi hỏi mức độ chính xác, tính sẵn sàng và tính toàn vẹn cao. Các sân bay là một ví dụ về ứng dụng GBAS.
Xử lý sau dữ liệu GNSS
Đối với nhiều ứng dụng, chẳng hạn như khảo sát trên không, các vị trí GNSS đã hiệu chỉnh là không cần thiết trong thời gian thực. Đối với các ứng dụng này, các phép đo vệ tinh GNSS thô được thu thập và lưu trữ để xử lý hậu nhiệm vụ. Không giống như định vị RTK GNSS, xử lý hậu kỳ không yêu cầu truyền các bản tin hiệu chỉnh vi sai theo thời gian thực. Điều này giúp đơn giản hóa cấu hình phần cứng rất nhiều.
Trong quá trình xử lý hậu kỳ, dữ liệu trạm gốc có thể được sử dụng từ một hoặc nhiều máy thu GNSS. Xử lý đa cơ sở giúp bảo toàn độ chính xác cao trong các khu vực dự án lớn, điều này thường xảy ra đối với các ứng dụng trên không. Tùy thuộc vào mức độ gần của dự án với mạng GNSS hoạt động lâu dài, dữ liệu trạm gốc thường có thể được tải xuống miễn phí, loại bỏ nhu cầu thiết lập (các) trạm gốc của riêng bạn. Hơn nữa, có thể xử lý mà không cần bất kỳ dữ liệu trạm gốc nào thông qua PPP, sử dụng dữ liệu đồng hồ và con thiêu thân chính xác đã tải xuống.
Các ứng dụng xử lý sau cung cấp rất nhiều tính linh hoạt. Các ứng dụng có thể liên quan đến các trạm gốc cố định hoặc di chuyển và một số hỗ trợ tích hợp với các mô-đun phần mềm của khách hàng hoặc bên thứ ba. Các ứng dụng xử lý hậu kỳ có thể được thiết kế để chạy trên máy tính cá nhân, có thể truy cập thông qua giao diện người dùng đồ họa dễ sử dụng.
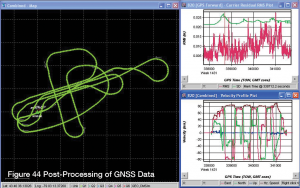
Trong ví dụ minh họa trong Hình 44, tuyến đường do chiếc xe thực hiện được hiển thị ở bên trái màn hình và các phép đo được ghi lại trong quá trình thực hiện nhiệm vụ, chẳng hạn như vận tốc, được phân thành các thành phần ngang và dọc, được hiển thị ở bên phải.
Quá trình xử lý hậu kỳ thường dẫn đến một giải pháp toàn diện, chính xác hơn so với thời gian thực.
Phương pháp Chỉnh sửa nào?
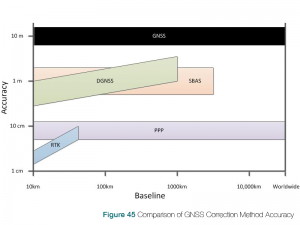
Như đã thảo luận ở đầu chương này, không có phương pháp hiệu chỉnh GNSS tốt nhất, chỉ có phương pháp phù hợp nhất với ứng dụng dự định. Hình 45 so sánh độ chính xác và phạm vi sử dụng thực tế của từng phương pháp được thảo luận trong chương này. Các phần sau cung cấp so sánh giữa các phương pháp hiệu chỉnh.
DGNSS và RTK
Cấu hình của các hệ thống GNSS (DGNSS) và RTK khác nhau ở chỗ cả hai phương pháp đều yêu cầu thiết lập bộ thu trạm gốc tại một vị trí đã biết, bộ thu rover nhận các hiệu chỉnh từ trạm gốc và liên kết giao tiếp giữa hai bộ thu. Sự khác biệt là RTK (một phương pháp pha sóng mang) chính xác hơn đáng kể so với DGNSS (một phương pháp dựa trên mã).
Ưu điểm của DGNSS là nó hữu ích trên đường cơ sở dài hơn (khoảng cách giữa trạm gốc và máy thu rover) và hệ thống DGNSS ít tốn kém hơn. Công nghệ cần thiết để đạt được độ chính xác cao hơn của hiệu suất RTK làm cho chi phí của một bộ thu hỗ trợ RTK cao hơn một bộ thu chỉ hỗ trợ DGNSS.
SBAS so với PPP
Hệ thống SBAS và hệ thống PPP giống nhau ở chỗ cả hai hệ thống đều nhận được hiệu chỉnh từ vệ tinh. Tuy nhiên, hệ thống PPP chính xác hơn đáng kể so với hệ thống SBAS. Một phần của lợi thế về độ chính xác là phương pháp hiệu chỉnh. Hệ thống PPP sử dụng phương pháp pha sóng mang và hệ thống SBAS sử dụng phương pháp mã. Một phần khác của lợi thế về độ chính xác là các dịch vụ chỉnh sửa riêng thường được các hệ thống PPP sử dụng cung cấp các hiệu chỉnh chất lượng cao hơn và đa tần số, đa chòm sao.
Ưu điểm của hệ thống SBAS là các dịch vụ sửa lỗi đều miễn phí cho mọi người sử dụng. Mặc dù các dịch vụ chỉnh sửa tư nhân cung cấp các chỉnh sửa chất lượng cao hơn và có sẵn trên toàn thế giới, nhưng bạn cần phải đăng ký trả phí để truy cập các tín hiệu. Ngoài ra, vì SBAS là một phương pháp dựa trên mã, nên không có sự mơ hồ nào cần giải quyết và độ chính xác đầy đủ của SBAS gần như ngay lập tức. Các hệ thống PPP yêu cầu thời gian để hội tụ (giải quyết sự không rõ ràng) trước khi có độ chính xác đầy đủ.
DGNSS vs SBAS
Mặc dù độ chính xác của DGNSS và SBAS là tương tự nhau, nhưng thiết bị cần thiết cho các hệ thống là khác nhau.
Hệ thống SBAS chỉ yêu cầu một máy thu có khả năng SBAS và một ăng ten GNSS. Hệ thống DGNSS yêu cầu một máy thu và ăng-ten của trạm gốc, máy thu và ăng-ten của bộ thu sóng và một liên kết giao tiếp giữa trạm gốc và bộ định tuyến. Ngoài ra, hệ thống DGNSS yêu cầu thiết lập hệ thống bổ sung vì trạm gốc phải ở một vị trí đã biết.
RTK so với PPP
Giống như DGNSS và SBAS, RTK và PPP cung cấp độ chính xác tương tự, nhưng thiết bị và thiết lập yêu cầu là khác nhau.
Hệ thống RTK cung cấp độ chính xác cao hơn và khởi tạo nhanh chóng, nhưng phức tạp hơn để thiết lập và đắt hơn. Hệ thống RTK yêu cầu ít nhất hai máy thu có khả năng RTK (một trạm gốc và một hoặc nhiều máy thu), một ăng ten GNSS cho mỗi máy thu và một liên kết giao tiếp giữa các máy thu. Ngoài ra, để đạt được mức độ chính xác cao, trạm gốc phải được thiết lập rất chính xác tại một vị trí đã biết.
Hệ thống PPP có cấu hình đơn giản hơn; một máy thu tương thích PPP duy nhất, một ăng-ten có khả năng nhận các tần số GNSS và L-Band và đăng ký với một nhà cung cấp dịch vụ hiệu chỉnh. Tuy nhiên, PPP có độ chính xác thấp hơn một chút và thời gian hội tụ ban đầu lâu hơn.
Một điểm khác biệt khác là độ dài đường cơ sở. Khoảng cách giữa trạm gốc và máy dò (độ dài đường cơ sở) trên hệ thống RTK ảnh hưởng trực tiếp đến độ chính xác của hệ thống. Ở độ dài đường cơ sở ngắn, vài km, RTK rất chính xác. Tuy nhiên, khi độ dài đường cơ sở tăng lên, độ chính xác và tính khả dụng của giải pháp giảm xuống. Ở độ dài đường cơ sở dài, RTK không còn được sử dụng nữa. Vì PPP không sử dụng trạm gốc nên nó không bị ảnh hưởng bởi độ dài đường cơ sở và có thể cung cấp độ chính xác đầy đủ ở mọi nơi trên thế giới.
Đóng nhận xét
Chương này đã mô tả, ở mức độ cao, một số khái niệm GNSS rất phức tạp. Nếu bạn muốn tìm hiểu thêm về những điều này, chúng tôi đã cung cấp danh sách tài liệu tham khảo ở cuối cuốn sách.




