
Kiến thức trắc địa
Các nguồn sai số trong định vị vệ tinh GNSS – GPS
Đồng hồ vệ tinh
Đồng hồ nguyên tử trong vệ tinh GNSS rất chính xác, nhưng chúng bị lệch một lượng nhỏ. Thật không may, một sự thiếu chính xác nhỏ trong đồng hồ vệ tinh dẫn đến sai số đáng kể trong vị trí do máy thu tính toán. Ví dụ, sai số đồng hồ 10 nano giây dẫn đến sai số vị trí là 3 mét.
Đồng hồ trên vệ tinh được giám sát bởi hệ thống kiểm soát mặt đất GNSS và được so sánh với đồng hồ thậm chí còn chính xác hơn được sử dụng trong hệ thống kiểm soát mặt đất. Trong dữ liệu đường xuống, vệ tinh cung cấp cho người dùng ước tính về độ lệch đồng hồ của nó. Thông thường, ước tính có độ chính xác khoảng ± 2 mét, mặc dù độ chính xác có thể khác nhau giữa các hệ thống GNSS khác nhau. Để có được vị trí chính xác hơn, bộ thu GNSS cần phải bù sai số cho đồng hồ.
Một cách để bù lỗi đồng hồ là tải xuống thông tin đồng hồ vệ tinh chính xác từ nhà cung cấp dịch vụ Hệ thống tăng cường dựa trên khoảng cách (SBAS) hoặc nhà cung cấp dịch vụ Định vị điểm chính xác (PPP). Thông tin chính xác về đồng hồ vệ tinh chứa các hiệu chỉnh cho các lỗi đồng hồ đã được hệ thống SBAS hoặc PPP tính toán. Thông tin thêm về SBAS và PPP được cung cấp trong Chương 5.
Một cách khác để bù cho lỗi đồng hồ là sử dụng cấu hình máy thu GNSS sai lệch hoặc động học thời gian thực (RTK). Chương 5 thảo luận sâu về GNSS và RTK vi phân.
Lỗi quỹ đạo
Vệ tinh GNSS di chuyển theo những quỹ đạo rất chính xác, được biết đến nhiều. Tuy nhiên, giống như đồng hồ vệ tinh, các quỹ đạo thay đổi một lượng nhỏ. Ngoài ra, giống như đồng hồ vệ tinh, một sự thay đổi nhỏ trong quỹ đạo dẫn đến sai số đáng kể về vị trí được tính toán.
Hệ thống kiểm soát mặt đất GNSS liên tục giám sát quỹ đạo vệ tinh. Khi quỹ đạo vệ tinh thay đổi, hệ thống điều khiển mặt đất sẽ gửi hiệu chỉnh đến các vệ tinh và con thiêu thân vệ tinh được cập nhật. Ngay cả với những hiệu chỉnh từ hệ thống kiểm soát mặt đất GNSS, vẫn có những sai số nhỏ trên quỹ đạo có thể dẫn đến sai số vị trí lên đến ± 2,5 mét.
Một cách để bù đắp lỗi quỹ đạo vệ tinh là tải xuống thông tin chính xác về con thiêu thân từ hệ thống SBAS hoặc nhà cung cấp dịch vụ PPP. SBAS và PPP được thảo luận kỹ hơn trong Chương 5.
Một cách khác để bù lỗi quỹ đạo vệ tinh là sử dụng cấu hình máy thu GNSS hoặc RTK khác biệt. Thông tin thêm về GNSS và RTK khác nhau được cung cấp trong Chương 5.
Độ trễ tầng điện ly
Tầng điện ly là lớp khí quyển cách trái đất từ 80 km đến 600 km. Lớp này chứa các hạt mang điện được gọi là ion. Các ion này làm trễ tín hiệu vệ tinh và có thể gây ra sai số vị trí vệ tinh đáng kể (Thường là ± 5 mét, nhưng có thể nhiều hơn trong thời gian hoạt động tầng điện ly cao).
Độ trễ tầng điện ly thay đổi theo hoạt động của mặt trời, thời gian trong năm, mùa, thời gian trong ngày và địa điểm. Điều này làm cho rất khó dự đoán độ trễ tầng điện ly đang ảnh hưởng đến vị trí được tính toán là bao nhiêu.
Độ trễ tầng điện ly cũng thay đổi dựa trên tần số vô tuyến của tín hiệu đi qua tầng điện ly. Máy thu GNSS có thể nhận nhiều hơn một tín hiệu GNSS, chẳng hạn như L1 và L2, có thể sử dụng điều này để làm lợi thế của chúng. Bằng cách so sánh các phép đo cho L1 với các phép đo cho L2, máy thu có thể xác định lượng trễ tầng điện ly và loại bỏ sai số này khỏi vị trí được tính toán.
Đối với các máy thu chỉ có thể theo dõi một tần số GNSS duy nhất, các mô hình tầng điện ly được sử dụng để giảm lỗi trễ tầng điện ly. Do tính chất khác nhau của độ trễ tầng điện ly, các mô hình không hiệu quả bằng việc sử dụng nhiều tần số để loại bỏ độ trễ tầng điện ly.
Các điều kiện tầng điện ly rất giống nhau trong một khu vực cục bộ, do đó trạm gốc và máy thu rover trải qua độ trễ rất giống nhau. Điều này cho phép các hệ thống GNSS và RTK khác biệt bù cho độ trễ tầng điện ly.
Độ trễ đối lưu
Tầng đối lưu là lớp khí quyển gần bề mặt Trái đất nhất.
Sự thay đổi độ trễ của tầng đối lưu là do sự thay đổi độ ẩm, nhiệt độ và áp suất khí quyển trong tầng đối lưu.
Vì các điều kiện của tầng đối lưu rất giống nhau trong một khu vực cục bộ, nên trạm gốc và máy thu rover trải qua độ trễ tầng đối lưu rất giống nhau. Điều này cho phép các hệ thống GNSS và RTK khác biệt bù đắp cho độ trễ tầng đối lưu.
Máy thu GNSS cũng có thể sử dụng mô hình tầng đối lưu để ước tính lượng lỗi gây ra bởi độ trễ tầng đối lưu.
Tiếng ồn máy thu
Nhiễu máy thu đề cập đến lỗi vị trí do phần cứng và phần mềm của máy thu GNSS gây ra. Máy thu GNSS cao cấp có xu hướng ít nhiễu máy thu hơn máy thu GNSS chi phí thấp hơn.
Multipath
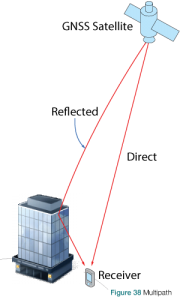 Đa đường xảy ra khi tín hiệu GNSS bị phản xạ từ một đối tượng, chẳng hạn như bức tường của một tòa nhà, tới ăng-ten GNSS. Bởi vì tín hiệu phản xạ đi xa hơn để đến ăng-ten, tín hiệu phản xạ đến máy thu hơi trễ. Tín hiệu bị trễ này có thể khiến người nhận tính toán vị trí không chính xác.
Đa đường xảy ra khi tín hiệu GNSS bị phản xạ từ một đối tượng, chẳng hạn như bức tường của một tòa nhà, tới ăng-ten GNSS. Bởi vì tín hiệu phản xạ đi xa hơn để đến ăng-ten, tín hiệu phản xạ đến máy thu hơi trễ. Tín hiệu bị trễ này có thể khiến người nhận tính toán vị trí không chính xác.
Cách đơn giản nhất để giảm lỗi đa đường là đặt ăng-ten GNSS ở vị trí cách xa bề mặt phản xạ. Khi điều này là không thể, bộ thu GNSS và ăng-ten phải xử lý các tín hiệu đa đường.
Lỗi đa đường trễ dài thường được xử lý bởi bộ thu GNSS, trong khi lỗi đa đường trễ ngắn được xử lý bởi ăng-ten GNSS. Do công nghệ bổ sung cần thiết để xử lý tín hiệu đa đường, máy thu GNSS và ăng-ten cao cấp có xu hướng loại bỏ lỗi đa đường tốt hơn.
Đóng nhận xét
Chương này đã mô tả các nguồn sai số gây ra sự thiếu chính xác trong tính toán vị trí. Trong Chương 5, chúng tôi sẽ mô tả các phương pháp mà máy thu GNSS sử dụng để giảm thiểu các lỗi này và cung cấp vị trí chính xác hơn.




