
Kiến thức trắc địa
Hệ thống GNSS + INS
Như đã thảo luận, GNSS sử dụng tín hiệu từ các vệ tinh quay quanh quỹ đạo để tính toán vị trí, thời gian và vận tốc. Điều hướng GNSS có độ chính xác tuyệt vời với điều kiện ăng-ten có khả năng hiển thị đường ngắm cho ít nhất bốn vệ tinh. Khi đường ngắm của vệ tinh bị chặn bởi các vật cản như cây cối hoặc tòa nhà, việc điều hướng trở nên không đáng tin cậy hoặc không thể thực hiện được.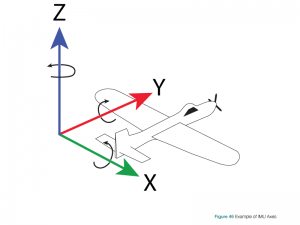
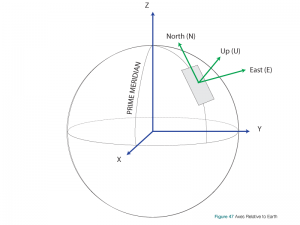
Hệ thống Điều hướng Quán tính (INS) sử dụng thông tin xoay và gia tốc từ Đơn vị đo lường quán tính (IMU) để tính toán vị trí tương đối theo thời gian. IMU được tạo thành từ sáu cảm biến miễn phí được sắp xếp trên ba trục trực giao. Trên mỗi trục trong số ba trục được ghép một gia tốc kế và một con quay hồi chuyển. Các gia tốc kế đo gia tốc tuyến tính và con quay hồi chuyển đo gia tốc quay. Với các cảm biến này, IMU có thể đo chuyển động tương đối chính xác của nó trong không gian 3D. INS sử dụng các phép đo này để tính toán vị trí và vận tốc. Một lợi thế bổ sung của các phép đo IMU là chúng cung cấp một giải pháp góc về ba trục. INS chuyển giải pháp góc này thành một giải pháp thái độ cục bộ (cuộn, cao độ và phương vị) mà nó có thể cung cấp ngoài vị trí và vận tốc.
Khả năng xác định thái độ của INS là một bổ sung quan trọng cho một số ứng dụng, chẳng hạn như khảo sát trên không và thủy văn. Ví dụ, trong các cuộc khảo sát trên không, điều quan trọng không chỉ là biết máy ảnh ở đâu khi chụp ảnh, mà còn cả góc độ máy ảnh so với mặt đất.
 IMU cung cấp các gia tốc và vòng quay này cho hệ thống INS dưới dạng các phép đo riêng biệt ở một tần số cụ thể. Thông thường, các hệ thống INS chạy ở tốc độ từ 50 đến 1000 Hz, mặc dù hầu hết các IMU có khả năng lấy mẫu dữ liệu của chúng với tốc độ nhanh hơn nhiều.
IMU cung cấp các gia tốc và vòng quay này cho hệ thống INS dưới dạng các phép đo riêng biệt ở một tần số cụ thể. Thông thường, các hệ thống INS chạy ở tốc độ từ 50 đến 1000 Hz, mặc dù hầu hết các IMU có khả năng lấy mẫu dữ liệu của chúng với tốc độ nhanh hơn nhiều.
Tất nhiên, tất cả các hệ thống, bao gồm cả IMU và do đó là INS, đều có những hạn chế riêng. Đầu tiên, INS chỉ cung cấp một giải pháp tương đối từ điểm xuất phát ban đầu. Điểm bắt đầu ban đầu này phải được cung cấp cho INS. Thứ hai, và quan trọng hơn, các phép đo tần số cao do IMU cung cấp bao gồm một số nguồn lỗi. Tùy thuộc vào chất lượng (tức là chi phí / kích thước) của IMU, những sai số này có thể khá lớn so với các phép đo thực tế đang được ghi lại. Điều hướng trong không gian 3D với IMU thực sự là tổng hợp (hoặc tích hợp) hàng trăm / nghìn mẫu mỗi giây trong thời gian đó các lỗi cũng đang được tích lũy. Điều này có nghĩa là một hệ thống INS không được điều chỉnh sẽ nhanh chóng trôi khỏi vị trí thực mà không có tham chiếu bên ngoài.
Tham chiếu bên ngoài đó có thể được cung cấp khá hiệu quả bởi GNSS. GNSS cung cấp một tập hợp tọa độ tuyệt đối có thể được sử dụng làm điểm xuất phát ban đầu. Ngoài ra, GNSS cung cấp các vị trí và vận tốc liên tục sau đó được sử dụng để cập nhật các ước tính của bộ lọc INS. Khi GNSS bị xâm phạm do các vật cản tín hiệu, hệ thống INS có thể tiếp tục điều hướng hiệu quả trong thời gian dài hơn.
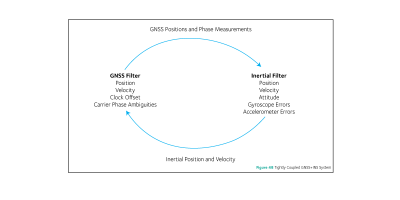
Sử dụng vị trí và vận tốc GNSS để ước tính sai số INS được gọi là hệ thống ‘kết hợp lỏng lẻo’. Tuy nhiên, hệ thống kết hợp GNSS + INS có thể phức tạp hơn thế nhiều. Một loạt các thuật ngữ như ‘kết hợp chặt chẽ’ hoặc ‘kết hợp sâu sắc’ chỉ ra rõ ràng mối quan hệ cộng sinh hơn nhiều giữa hai điều này. Trong các hệ thống này, các phép đo GNSS thô được sử dụng trực tiếp để hỗ trợ INS và INS thậm chí có thể được sử dụng như một ràng buộc để giúp GNSS lấy lại các tín hiệu bị mất nhanh hơn hoặc từ chối các tín hiệu xấu. Hình 48 cho thấy một sơ đồ đơn giản của một hệ thống kết hợp chặt chẽ.
Do đó, khi GNSS và INS được kết hợp, hai kỹ thuật tăng cường lẫn nhau để cung cấp một giải pháp điều hướng mạnh mẽ, như được minh họa trong Hình 49. Khi điều kiện GNSS tốt (đường ngắm của một số vệ tinh), bộ thu GNSS cung cấp vị trí chính xác và thời gian đến hệ thống định vị. Khi các điều kiện GNSS trở nên kém, INS cung cấp vị trí và điều hướng cho đến khi các điều kiện GNSS được cải thiện.
Máy đo kỳ lạ
GNSS không phải là đầu vào hữu ích duy nhất để hỗ trợ điều hướng quán tính. Đối với các môi trường khác nhau, các cảm biến khác nhau cũng có thể được thêm vào để hỗ trợ giải pháp. Một cảm biến bên ngoài phổ biến cho các phương tiện mặt đất là việc bổ sung đồng hồ đo đường. Điều này cung cấp một phép đo độc lập khác về độ dịch chuyển và vận tốc có thể hỗ trợ giải pháp điều hướng GNSS + INS. Điều này chủ yếu được sử dụng khi tín hiệu GNSS bị từ chối, ví dụ như khi đi qua đường hầm.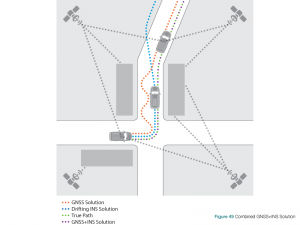
Điều hướng hỗ trợ tầm nhìn
Một nguồn hỗ trợ tiềm năng khác là sử dụng phép đo quang hoặc sử dụng điều hướng hỗ trợ tầm nhìn. Trong hệ thống điều hướng hỗ trợ tầm nhìn, hình ảnh được sử dụng để cung cấp thông tin vị trí cho hệ thống điều hướng. Hình ảnh từ máy ảnh được xử lý bởi hệ thống định vị để nhận dạng và theo dõi các đối tượng trong môi trường.
Có hai cách có thể được sử dụng. Các mục tiêu camera khảo sát đã biết có thể được sử dụng để tạo ra một vị trí tuyệt đối trong một môi trường nhất định hoặc các đối tượng hàng ngày có thể được sử dụng làm điểm kiểm soát; khi một đối tượng được hệ thống nhận dạng, sự thay đổi tương đối trong các hình ảnh liên tiếp có thể được sử dụng để tạo ra sự thay đổi vị trí tương đối của máy ảnh trong không gian 3D.
Điều này có nghĩa là hệ thống hỗ trợ tầm nhìn có thể được kết hợp với hệ thống GNSS + INS để cung cấp các cập nhật về vị trí và thái độ cho INS khi các cập nhật GNSS không có sẵn. Một ứng dụng ví dụ cho hệ thống định vị hỗ trợ tầm nhìn là một phương tiện không người lái được sử dụng để chở hàng từ bãi vào nhà kho. Khi xe không người lái ở bên ngoài, GNSS + INS cung cấp điều hướng cho xe. Khi bên trong nhà kho, hệ thống hỗ trợ tầm nhìn sử dụng các tính năng / mục tiêu đã biết trong tòa nhà để cung cấp thông tin cập nhật về vị trí cho INS.
Cảm biến nhiệt hạch
Một thuật ngữ ngày càng phổ biến trong lĩnh vực này là ‘hợp nhất cảm biến’. Càng ngày, nó không chỉ là GNSS, hay thậm chí là GNSS + INS, nó là sự kết hợp của bất kỳ và tất cả thông tin có sẵn để tạo ra giải pháp mạnh mẽ và chính xác nhất có sẵn trong mọi điều kiện. Tất cả các công nghệ đầu vào, GNSS, INS, máy ảnh, đồng hồ đo đường, mô hình độ cao kỹ thuật số, cảm biến phạm vi, v.v. đều được tính đến.
Đóng nhận xét
Nếu bạn muốn tìm hiểu thêm về chủ đề trong chương này, chúng tôi đã cung cấp danh sách tài liệu tham khảo ở cuối sách.




