
Tư vấn
Khám phá LiDAR dựa trên UAV đã thay đổi ngành khảo sát như thế nào
Khi lựa chọn các sản phẩm GNSS, chúng ta có thể thấy độ chính xác tĩnh, độ chính xác RTK và độ chính xác PPK trong các thông số kỹ thuật. Trong số các phương pháp đo GNSS phổ biến này, có phải độ chính xác càng cao càng tốt? Sự khác biệt giữa các phương pháp này là gì và chúng ta nên chọn phương pháp tương ứng trong các ứng dụng nào?
Với sự phát triển nhanh chóng của ngành công nghiệp GNSS chính xác cao, các cuộc điều tra GNSS ngày càng trở nên phổ biến hơn trên toàn thế giới. Khi lựa chọn các sản phẩm GNSS, chúng ta có thể thấy độ chính xác tĩnh, độ chính xác RTK và độ chính xác PPK trong các thông số kỹ thuật. Trong số các phương pháp đo GNSS phổ biến này, có phải độ chính xác càng cao càng tốt? Sự khác biệt giữa các phương pháp này là gì và chúng ta nên chọn phương pháp tương ứng trong các ứng dụng nào?
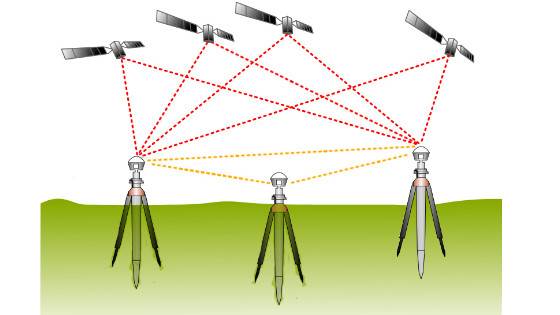
Đo tĩnh
Nguyên tắc đo tĩnh GPS: Theo các quan sát pha sóng mang được đo bởi một số máy thu GPS theo dõi tín hiệu vệ tinh GPS, sử dụng phương pháp chênh lệch, chênh lệch tọa độ giữa các trạm quan sát thu được, tức là vectơ đường cơ sở. Sau đó theo tọa độ điểm đã biết và véc tơ cơ sở để có được tọa độ của các trạm khác. Định vị tương đối có thể loại bỏ hoặc giảm đáng kể các sai số (chẳng hạn như sai số đồng hồ vệ tinh, độ trễ tầng điện ly và độ trễ quá trình, v.v.), do đó có thể thu được vị trí tương đối có độ chính xác cao, được sử dụng rộng rãi trong các phép đo kiểm soát.
RTK
Hệ thống đo RTK (Real Time Kinematic) nói chung bao gồm ba phần: máy thu GNSS, hệ thống truyền dữ liệu và hệ thống phần mềm đo động. Công nghệ đo RTK dựa trên quan sát pha sóng mang và có công nghệ đo chênh lệch pha sóng mang với chức năng định vị nhanh và chính xác cao. Nó có thể thu được kết quả định vị ba chiều của trạm trong hệ tọa độ được chỉ định trong thời gian thực và có độ chính xác định vị cấp độ centimet.
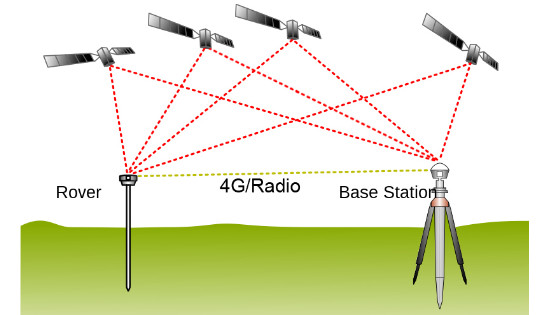
Nguyên tắc hoạt động của phép đo RTK là: Đặt một bộ thu GNSS làm trạm gốc và thiết lập một hoặc nhiều bộ thu làm bộ định tuyến. Trạm gốc và máy dò đồng thời nhận tín hiệu được truyền bởi cùng một vệ tinh GNSS tại cùng một thời điểm, và giá trị quan sát thu được của trạm gốc được so sánh với thông tin vị trí đã biết để thu được giá trị hiệu chỉnh vi sai GNSS. Sau đó, giá trị hiệu chỉnh này được truyền đến bộ lưu động thông qua liên kết dữ liệu thời gian thực để hiệu chỉnh giá trị quan sát GNSS của nó, để có được vị trí thời gian thực chính xác hơn của bộ chuyển động sau khi hiệu chỉnh vi phân.
PPK
Nguyên lý hoạt động của công nghệ PPK (Post-Processing Kinematic) là sử dụng một máy thu trạm gốc và ít nhất một máy thu di động để tiến hành quan sát đồng bộ các vệ tinh GNSS. Điều đó có nghĩa là, trạm gốc duy trì quan sát liên tục và thiết bị di chuyển được khởi tạo có thể di chuyển đến điểm tiếp theo sau khi đo. Trong quá trình di chuyển, cần duy trì liên tục theo dõi vệ tinh để truyền tin mơ hồ của cả tuần về điểm cần xác định.
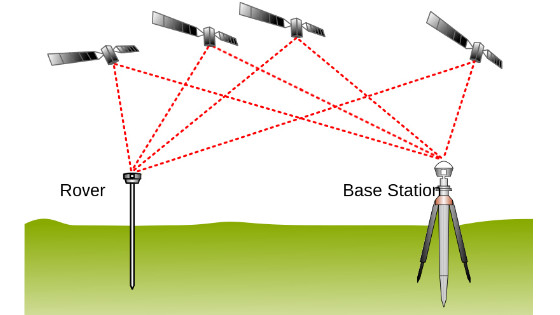
Dữ liệu nhận được bởi trạm cơ sở và bộ định tuyến đồng bộ được kết hợp tuyến tính trong máy tính để tạo thành quan sát pha sóng mang ảo, xác định vị trí tương đối giữa các máy thu và cuối cùng đưa ra tọa độ đã biết của trạm gốc để thu được tọa độ ba chiều. của rover.
Tĩnh so với RTK và PPK
| Phương thức khảo sát | Khảo sát tĩnh | RTK | PPK |
|---|---|---|---|
| Số lượng thiết bị GNSS | Ít nhất 3 thiết bị | Ít nhất 1 cơ sở + 1 thiết bị di chuyển | Ít nhất 1 cơ sở + 1 thiết bị di chuyển |
| Truyền thời gian thực | Không yêu cầu | 4G / Đài | Không yêu cầu |
| Thời gian đo lường | ≥ 40 phút | 1 – 10 giây mỗi điểm | 1 – 10 giây mỗi điểm |
| Thời gian xử lý | Xử lý hậu kỳ | Xử lý thời gian thực | Xử lý hậu kỳ |
| Phạm vi làm việc | ≥ 50 km | 10 – 20 km | ≥ 50 km |
| Tần suất định vị | Lên đến 50 Hz | 1 – 2 Hz | Lên đến 50 Hz |
| Định vị chính xác | 2,5 mm + 1 ppm Theo chiều ngang 5 mm + 1 ppm Theo chiều dọc |
8mm + 1ppm Theo chiều ngang 15mm + 1ppm Theo chiều dọc |
2,5 mm + 1 ppm Theo chiều ngang 5 mm + 1 ppm Theo chiều dọc |
| Các ứng dụng | Khảo sát điểm kiểm soát | Khảo sát chi tiết và tham gia | Khảo sát và lập bản đồ UAV |
Theo đặc điểm của các phương pháp đo lường khác nhau, các kịch bản ứng dụng của chúng cũng khác nhau. Đối với dự án khảo sát, khảo sát tĩnh với độ chính xác định vị cao hơn có thể được sử dụng để khảo sát điểm khống chế. Và RTK với khả năng định vị nhanh chóng và thời gian thực có thể được sử dụng cho các nhiệm vụ khảo sát chi tiết và liên quan. Riêng với UAV đo đạc và bản đồ, PPK với tần số định vị 50Hz có thể đáp ứng nhu cầu di chuyển tốc độ cao của nó. Trong khi đó, PPK không yêu cầu giao tiếp thời gian thực, điều này có thể giảm bớt gánh nặng cho các UAV và tăng sức chịu đựng của chúng.
Vậy cái nào tốt hơn trong số khảo sát tĩnh, RTK và PPK? Thật khó để đánh giá. Chỉ cần chọn phương pháp khảo sát tùy thuộc vào đặc điểm nhiệm vụ của bạn, những gì phù hợp là tốt nhất.




