
Kiến thức trắc địa
Nguyên tắc và Hiệu suất của Trạm CORS, định vị RTK và VRS
Trạm CORS
CORS, còn được gọi là Trạm tham chiếu hoạt động liên tục, là một hoặc một số trạm tham chiếu GNSS cố định và hoạt động liên tục, với sự kết hợp của máy tính, truyền thông dữ liệu và công nghệ Internet (LAN / WAN) để tự động cung cấp nhiều nhu cầu của người dùng với các loại GNSS khác nhau quan sát (giai đoạn sóng mang, sự thay đổi giả), các hiệu chỉnh khác nhau, trạng thái và các hệ thống dịch vụ GNSS khác trong thời gian thực. Là một hệ thống bao gồm phần cứng và phần mềm.
– Phần cứng bao gồm: Máy thu GPS và antenna. Được lắp đặt tại một nơi ổn định và an toàn. Đảm bảo cho quá trình vận hành không bị gián đoạn.

Hình 1. Máy thu GPS và Anthena
– Phần mềm bao gồm: Phần mềm quản lý và thu thập dữ liệu từ máy thu. Phần mềm giúp tính toán và gửi tín hiệu hiệu chỉnh DGPS, RTK tới các thiết bị định vị RTK, DGPS hay GIS. Máy tính cài đặt phần mềm quản lý có thể được đặt ở xa nếu cần thiết. Máy thu GPS trạm CORS sẽ được kết nối thông qua hạ tầng mạng internet.
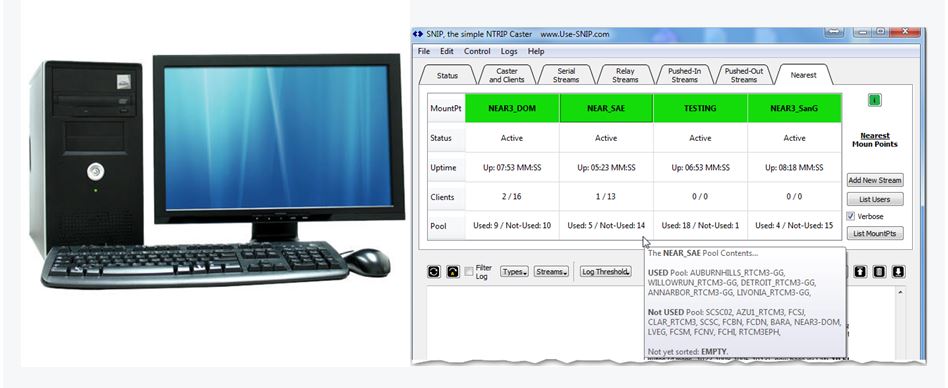
Hình 2. Máy tính và phần mềm trạm CORS
Nhu cầu sử dụng GPS nhận tín hiệu hiệu chỉnh từ trạm CORS cố định hiện nay là rất cao. Sử dụng trạm CORS phục vụ công tác khảo sát địa hình, thành lập bản đồ GIS… là rất phổ biến. Công nghệ CORS cho phép đạt được độ chính xác cao không hề thua kém các phương pháp đo GPS truyền thống khác. Đồng thời, công nghệ CORS giúp rút ngắn thời gian cũng như đạt hiệu suất cao.

Hình 3. Trạm CORS
Hệ thống trạm CORS sử dụng hạ tầng mạng internet để truyền tải thông tin giữa phần mềm quản lý và máy GPS trạm, giữa các máy thu rover với hệ thống trạm CORS. Yêu cầu lắp đặt cũng đơn giản hơn nhiều. Phương pháp đo chủ yếu là RTK network nên độ chính xác cũng tăng lên. Thậm chí có thể đạt cỡ vài mm ngay cả với giải pháp single base.

Hình 4. Trạm CORS
Theo đó, các trạm CORS giống như một trạm Base cố định tại mốc đã biết tọa độ. Phát tín hiệu cải chính đến các Rovers máy thu GNSS đo chi tiết thông qua mạng hạ tầng 3G/4G. Tầm hoạt động hiệu quả của trạm CORS trong bán kính từ 0 – 40km. Các công tác đo đạc định vị không cần độ chính xác cao (> 3cm) thì tầm hoạt động của trạm CORS có thể lên đến 70km hoặc hơn. Nếu sử dụng trạm CORS phát trực tiếp bằng bộ thu không qua phần mềm, không giới hạn số lượng máy Rover kết nối vào trạm CORS. Nếu sử dụng trạm CORS phát bằng phần mềm, tùy thuộc vào bản quyền người dùng mua sẽ có giới hạn cho từng bản quyền.
Hiện Trạng Hệ Thống Trạm Cors Tại Việt Nam
Trước lợi ích to lớn của hệ thống trạm Cors, Cục Đo Đạc Bản Đồ đã cho xây dựng hệ thống trạm Cors nằm rải đều trên hầu hết các khu vực trên lãnh thổ Việt Nam, để người dùng có thể đứng bất cứ đâu cũng có thể kết nối và sử dụng được.
Về phần cơ sở hạ tầng:
Tại thời điểm năm 2021, Việt Nam đã có tổng cộng 65 trạm GNSS CORS, trong đó,:
- 24 trạm Geodetic CORS được bố trí trên phạm vi toàn quốc với khoảng cách trung bình giữa các trạm từ 150÷200 km
- 41 trạm NRTK CORS được bố trí tại 3 khu vực: Đồng bằng Bắc Bộ; khu vực miền Trung và Tây Nguyên; khu vực Nam Bộ với khoảng cách trung bình giữa các trạm từ 50 – 80km.
Dữ liệu từ 65 trạm GNSS CORS được truyền trực tiếp qua mạng Internet về Trạm xử lý và Điều khiển Trung tâm tại Hà Nội để xử lý tính toán và cung cấp cho người sử dụng qua mạng Internet theo thời gian thực.Đến nay, công tác đo đạc, xử lý tính toán xác định tọa độ tại 65 trạm GNSS CORS đã hoàn thành trên cả 2 hệ tọa độ VN-2000 và ITRF2014.
Mục tiêu:
- Một trong những mục tiêu của hệ thống đó là cung cấp dịch vụ đo động thời gian thực (RTK) với độ chính xác cao cỡ cm cho các khu vực có xây dựng các trạm NRTK là Đồng bằng Bắc Bộ, Trung Trung Trung Bộ và Nam Bộ.
- Thực tế, sau khi hệ thống đi vào hoạt động đã nhận thấy không những mục tiêu này đạt được với độ chính xác rất cao (cỡ 2 – 4cm) mà các khu vực khác vẫn có thể được hệ thống cung cấp dịch vụ đo động thời gian thực với độ chính xác hoàn toàn thỏa mãn đáp ứng yêu cầu đo đạc, thành lập bản đồ địa hình tỷ lệ 1/2.000 và tỷ lệ nhỏ hơn.
- Trong tương lai, để có thể cung cấp dịch vụ với độ chính xác cao hơn cần bổ sung các trạm NRTK với mật độ tương tự các trạm NRTK đã được lắp đặt tại khu vực Đồng bằng Bắc Bộ, Trung Trung Bộ và Nam Bộ.
Về phần người dùng
- Các tổ chức tham gia đăng ký sử dụng dịch vụ chủ yếu là phục vụ đo đạc, bản đồ cũng như quản lý đất đai.
- Số lượng tài khoản đăng ký sử dụng dịch vụ ngày một tăng, đến nay, đã có tổng số gần 600 tài khoản được đăng ký thành công.
- Các địa phương hiện đang ứng dụng dịch vụ của mạng lưới trạm định vị vệ tinh quốc gia nhiều nhất phải kể đến, như: Hà Nội, Thái Nguyên, Quảng Ninh, Bắc Giang, TP. Hồ Chí Minh…
4. Cách Đăng Ký Sử Dụng Trạm Cors
Các bước đăng ký trạm Cors:
Bước 1: Tải mẫu đơn đăng ký trạm CorsBạn có thể tại mẫu đơn đăng ký trạm Cors TẠI ĐÂY
Bước 2: Điền đầy đủ thông tin và gửi tới Cục Đo Đạc Bản Đồ
Sau khi có mẫu đơn đăng ký sử dụng trạm Cors, bạn cần phải điền đầy đủ thông tin, in ra giấy, ký tên, đóng dấu, scan chuyển sang dạng PDF và gửi tới email của Cục đo đạc bản đồ theo địa chỉ: vngeonet.vn@gmail.com
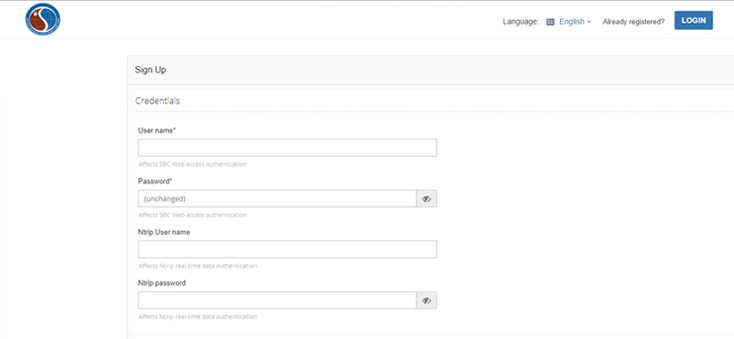
Bước 3: Đăng Ký Tài Khoản Cors
Truy cập website: http://vngeonet.vn để đăng ký tài khoản sử dụng. Lưu ý: tài khoản đăng nhập trang chủ chính là tài khoản sử dụng trạm cors.
Sau khi đã đăng ký thành công, admin sẽ gửi tin nhắn về Email mà bạn đã đăng ký trong đơn đăng ký để xác nhận việc đăng ký thành công tài khoản. Như vậy là bạn đã hoàn thành việc đăng ký sử dụng tài khoản trạm cors của cục đo đạc bản đồ.
Khi đã đăng ký thành công, bạn đã có thể sử dụng máy RTK của mình để kết nối trạm Cors, thực hiện công tác đo đạc khảo sát bình thường.
Định vị RTK
GNSS RTK, còn được gọi là trạm đa tham chiếu RTK, là một phương pháp định vị thiết lập nhiều (thường là ba hoặc nhiều hơn) trạm tham chiếu GNSS trong một khu vực để tạo thành vùng phủ lưới, đồng thời tính toán và phát thông tin hiệu chỉnh GNSS dựa trên một hoặc nhiều hơn các trạm tham chiếu này và thực hiện các chỉnh sửa trong thời gian thực cho người dùng GNSS trong lĩnh vực này.
Các phương pháp đo RTK
Đo RTK với cơ sở dữ liệu trạm Cors (Cors Cục – Cors Tư nhân).
Hiện nay với hệ thống trạm Cors của Cục Đo đạc và Bản đồ đã trải khắp các tỉnh thành của Việt Nam. Cùng với các trạm Cors tư nhân cũng phát triển mạnh mẽ. Việc thực hiện công tác đo đạc RTK trở nên rất thuận tiện và nhanh chóng.
Chỉ cần 01 đầu máy GPS, tiến hành các bước kết nối. Thiết lập các thông số của trạm Cors là người dùng có thể tiến hành đo đạc với độ chính xác đảm bảo.
Đo RTK với tín hiệu Base – Rover.
Đo RTK bằng Base – Rover có 2 phương pháp. Đo Base – Rover bằng radio trong và đo Base – Rover bằng bộ phát radio ngoài.
Thông thường để giảm cự ly từ trạm Cors đến thiết bị đo RTK. Người dùng có thể sử dụng phương pháp đo Base – Rover. Người dùng tiến hành thiết lập các thông số về vị trí, tần số của thiết bị Base- Rover. Máy Base là thiết bị thu, xử lý và phát tín hiệu, máy Rover nhận tín hiệu và đo đạc.
Việc đo RTK bằng tín hiệu Base – Rover bằng radio ngoài thường được sử dụng trong các điều kiện đo đạc không thuận lợi như tín hiệu di động yếu, chập chờn. Việc phát tín hiệu được dựa trên việc liên kết với một thiết bị phát radio ngoài, thiết bị Rover nhận tín hiệu và tiến hành đo đạc.
Phạm vị hoạt động của máy Rover so với máy Base lên tới 12km trong điều kiện thuận lợi.
Ứng dụng của việc đo RTK
Phương pháp đo vẽ bằng công nghệ RTK rất đơn giản. Khả năng đo chi tiết ở phạm vi khá lớn. Trạm máy ít phải di chuyển nên tốc độ đo nhanh hơn. Sử dụng ít nhân lực tiết kiệm tối đa chi phí.
- Đo khảo sát địa hình, cầu, đường, thủy lợi….
- Kết hợp máy đo sâu để đo khảo sát độ sâu kênh, biển, mương..
- Đo động thành lập mốc..
- Đo tĩnh quan trắc, thành lập mốc..
Trạm tham chiếu ảo VRS
Trạm tham chiếu ảo. đề cập đến số lượng nhất định (ít nhất ba) trạm tham chiếu được thiết lập trong một khu vực để thu tín hiệu vệ tinh và truyền thông tin đến trung tâm xử lý thông tin. Rover gửi thông tin vị trí của máy thu đến trung tâm xử lý dữ liệu, và trung tâm xử lý dữ liệu sẽ chọn thông tin của một số trạm tham chiếu gần đó để “ảo” tạo một trạm tham chiếu dựa trên vị trí của trạm di động, sau đó phát sóng điều chỉnh. dữ liệu của trạm tham chiếu ảo đến trạm di động. Vị trí của trạm tham chiếu ảo này thường nằm trong phạm vi 5 km xung quanh trạm di động, nhưng trên thực tế, nó thường nằm trong phạm vi vài mét. Sai số của dữ liệu thu được thông qua công nghệ này được giảm thiểu đáng kể.

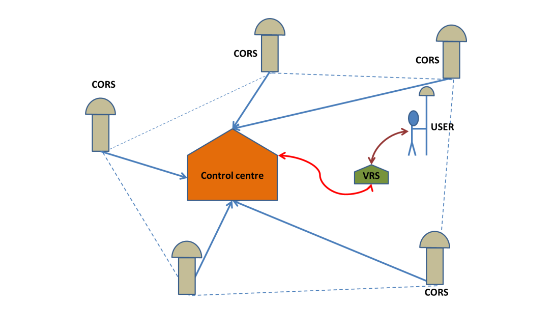
Hình 1. Sơ đồ nguyên lý làm việc của VRS
So sánh và phân tích một số công nghệ RTK
|
VRS |
FKP | MAC |
CBI |
|
| Mô hình toán học cơ bản | Mô hình nội suy của mô hình quan sát sai biệt kép | Kalman Lọc Mô hình Quan sát Không Khác biệt của Giải pháp Toàn cầu Toàn mạng | Mô hình quan sát sai biệt kép / mô hình tương thích | Mô hình nội suy của mô hình quan sát sai biệt kép |
| Mô hình lỗi không gian | Về phía máy chủ | Về phía người dùng di động | Về phía người dùng di động | Về phía máy chủ |
| Trạm tham chiếu tham gia tính toán | Cần chọn một trạm tham chiếu chính và tất cả các trạm tham chiếu trong mạng đều tham gia vào tính toán định vị | Không chọn trạm tham chiếu chính, hãy chọn ba trạm tham chiếu gần nhất với bộ định tuyến | Cần chọn một trạm chính, nhưng không bắt buộc phải sử dụng trạm gốc gần người dùng nhất làm trạm chính | Lựa chọn linh hoạt trạm tham chiếu theo vị trí tương đối của bộ định tuyến và trạm tham chiếu |
| Chế độ giao tiếp | Giao tiếp hai chiều | Giao tiếp một chiều | Giao tiếp hai chiều và một chiều | Giao tiếp một chiều |
| Mạng GPS của Trimble | Mạng SAPOS của Đức | Mạng của Leica | PowerNet của Đại học Vũ Hán |
Cơ bản về VRS

Công nghệ chính của phần mềm VRS
Đầu tiên là việc khắc phục sự mơ hồ về đường cơ sở dài của trạm gốc. Làm thế nào để khắc phục nhanh chóng và chính xác sự mơ hồ đường cơ sở dài là yếu tố chính ảnh hưởng đến thời gian khởi tạo và tính khả dụng của hệ thống.
Thứ hai là mô hình hóa chính xác các sai số khí quyển không gian khu vực. Độ chính xác của mô hình hóa của sai số khí quyển ảnh hưởng trực tiếp đến độ chính xác định vị của người dùng.
Xung quanh hai yếu tố cốt lõi này, các công nghệ liên quan cần giải quyết
Truyền, mã hóa và giải mã dữ liệu theo thời gian thực ở các định dạng khác nhau
Kiểm soát chất lượng dữ liệu, xử lý các lỗi liên quan như trượt chu kỳ, trượt xung nhịp, đa đường;
Xử lý đồng thời khi người dùng có dung lượng lớn truy cập;
1) Khắc phục sự không rõ ràng của đường cơ sở
a) Không rõ làn đường rộng

b) Sự kết hợp Deionospheric

c) Sự không rõ ràng L1 và độ trễ cực đỉnh RZTD (hiệu ứng tầng đối lưu là không đáng kể đối với các đường cơ sở ngắn và không cần được ước tính, nhưng cần được ước tính đối với các đường cơ sở dài)

1) Tính toán độ trễ sai số khí quyển đường cơ sở
a) Tính toán độ trễ tầng điện ly chênh lệch kép


b) Tính toán độ trễ tầng đối lưu chênh lệch kép
3) Nội suy tuyến tính của độ trễ tầng đối lưu và tầng điện ly tại các trạm tham chiếu ảo
4) Tạo số hiệu chỉnh toàn diện của trạm tham chiếu ảo
a) Các thông số hiệu chỉnh toàn diện:
b) Các quan sát không khác biệt:

So sánh định vị VRS và SRTK
| Chế độ định vị | RMS ngang (m) | RMS dọc (m) | Phạm vi ngang (m) | Tỷ lệ chạy vượt mức lỗi | Tỷ lệ cố định |
| VRS | 0.0073269 | 0.01224 | 0.04 | 0.86% | 100% |
| SRTK | 0.0061154 | 0.01021 | 0.03 | 0.45% | 100% |
Số lượng vệ tinh được tính theo hai chế độ là như nhau, độ chính xác định vị ngang và dọc của VRS thấp hơn một chút so với SRTK, Tỷ lệ vượt lỗi cũng cao hơn trong SRTK, vẫn cần tối ưu hóa thêm.
Qua kiểm tra và xác minh thực tế, độ chính xác định vị RTK của mạng CDC.NET nằm trong phạm vi 80km trên một mặt và có thể đạt độ chính xác định vị của mạng là 2cm theo chiều ngang và 3cm theo chiều dọc, tốt hơn so với chiều ngang 10cm + D × 10 -6 và độ chính xác định vị 10cm + D × 10-6 dọc theo yêu cầu của thiết kế hệ thống. Và tính liên tục của hệ thống định vị, khả năng sử dụng, thời gian cố định khởi tạo và các chỉ số khác đều đáp ứng các chỉ số hiệu suất định vị RTK, ở mức hàng đầu trong ngành.




