
Hotline đặt hàng
HỎI Đáp
Máy đo RTK được biết đến là một trong những thiết bị đo đạc dùng để đảm bảo độ chính xác cao cho GPS thông qua một trạm tĩnh và một trạm động. Hệ thống này mang đến những công dụng vượt trội song vẫn còn khá ít người biết đến. Vì lẽ đó mà bài viết này sẽ nêu hướng dẫn sử dụng máy đo RTK một cách chi tiết nhất đến với mọi khách hàng hiện nay.
NHỮNG LƯU Ý TỚI KHÁCH HÀNG KHI SỬ DỤNG MÁY RTK
Đối với việc quản lý, nắm bắt những sự thay đổi khác nhau của nguồn tài nguyên đất, việc sử dụng máy RTK là một trong những ứng dụng rộng rãi hiện nay. Tuy nhiên, trước khi tìm hiểu về cách sử dụng máy RTK, ta cần điểm qua một số lưu ý quan trọng sau:
LƯU Ý KHI ĐẶT MÁY ĐO
- Trạm tĩnh (máy thu GPS hai tần số cố định) cần có độ chính xác bắt đầu từ DC trở lên và phải được đặt ở vị trí cao ráo, thông thoáng.
- Khoảng cách giữa trạm tĩnh và trạm động (máy thu GPS hai tần số chuyển động) không được lớn hơn 12km.
- Cả hai trạm đều phải được cài đặt tham số về hệ tọa độ VN2000 theo quy định của Bộ Tài nguyên và Môi trường để thuận tiện và đạt kết quả chính xác cho tính toán.

Trạm động và trạm tĩnh
NHỮNG THÔNG SỐ KỸ THUẬT CẦN PHẢI ĐẢM BẢO
- Số vệ tinh: SVS phải lớn hơn hoặc bằng 4.
- Status hay Trạng thái cần để Fixed.
- Sai số vị trí điểm MP: HRMS phải bé hơn hoặc bằng Sai số xác định tại vị trí góc ranh.
ĐỘ CHÍNH XÁC CẦN ĐẠT KHI ĐO RTK
Với việc đo tĩnh, độ chính xác cần đạt là:
- Sai số mặt phẳng là 2,5mm + 1ppm RMS
- Sai số cao độ là 5mm + 1ppm RMS
Với việc đo RTK, độ chính xác cần đạt là:
- Sai số tại vị trí điểm là 10mm + 1ppm RMS
- Sai số cao độ là 20mm + 1ppm RMS
HƯỚNG DẪN SỬ DỤNG GPS MÁY ĐO RTK
Việc đo GPS RTK được xem là phương pháp đo động xử lý tức thời thông qua việc thu định vị vệ tinh nhân tạo và tính toán ra một số nguyên đa trị N (còn được hiểu là số gia cải). Số N trên sẽ được phát ra và mang đến vị trí đặt máy Rover nhằm hiệu chỉnh các máy di động nhằm đem lại kết quả chính xác nhất. Cụ thể, để thực hiện thao tác trên một cách chuẩn hơn, bạn cần nắm được các hướng dẫn sử dụng máy đo RTK như sau:
Với bất kỳ mẫu máy đang có hiện nay, điều đầu tiên bạn cần làm đó chính là tiến hành công việc cài đặt máy. Điều này đảm bảo các kết nối với sóng GPS, cài đặt trực tiếp với máy tính cũng như kích hoạt hệ điều hành CORS Network sẽ trở nên dễ dàng và chính xác hơn. Ngoài ra, mỗi loại máy khác nhau sẽ cho ra những bước cài đặt khác nhau; chính vì thế cần phải tuân thủ nghiêm ngặt bước này để tránh các sai sót trong kết quả thu về.
Tham khảo: Máy toàn đạc Topcon

Mẫu máy đo GPS bằng RTK
Ở bước này, bạn cần nghiên cứu kỹ không gian phù hợp để đo. Bởi mỗi thiết bị đo đạc trắc địa đều được chế tạo phù hợp với từng khu vực địa hình riêng nhằm cho ra kết quả tốt nhất.
Chính vì thế, hãy xem xét thật rõ cấu tạo cũng như giới hạn khu vực đo nhằm mang đến hiệu quả sử dụng cao cho bản thân.
Trong quá trình đo GPS RTK, bộ phận phát mang số cải chính sẽ truyền tín hiệu dạng sóng vô tuyến UHF với công suất 25W cùng 9 kênh mang tần số khác nhau. Phạm vi hoạt động của máy Rover này có thể lên đến 12km trong địa hình thuận lợi. Lúc này, trên màn hình cửa sổ điện tử của Rover sẽ hiện liên tục những thông báo kết quả về độ chính xác. Dựa theo những lưu ý bắt buộc trong thông số, đến khi đặt được con số chuẩn theo yêu cầu; bạn sẽ bấm OK để lưu kết quả.
Khách hàng tham khảo: Thuê máy toàn đạc ở đâu giá tốt nhất ?

Đo GPS bằng RTK
HƯỚNG DẪN CÁCH CHUYỂN ĐIỂM RA THỰC ĐỊA
Bên cạnh nắm rõ các hướng dẫn sử dụng máy RTK, việc thông hiểu cách chuyển điểm ra thực địa cũng là một trong những yêu cầu hàng đầu hỗ trợ công tác bố trí công trình. Nhằm xác định vị trí mặt bằng của các điểm, các đường thẳng và các chi tiết trong thiết kế; khái niệm bố trí điểm thực địa đã ra đời. Thông thường, quy trình chuyển điểm thực địa được tiến hành như sau
ĐO TỌA ĐỘ ĐIỂM
Khi đã đảm bảo kết nối máy với trạm CORS đúng theo hướng dẫn sử dụng máy đo RTK đã tham khảo, bạn sẽ tiến hành thiết lập Project mới để đo. Cụ thể:
- Trong mục Project bạn sẽ chọn New Project, đặt tên Job và nhất OK.
- Trên hệ tọa độ mới: Ấn chọn New System, chọn Coordinate System và ấn vào hệ tọa độ có sẵn VN2000.sys để thay đổi hệ tọa độ đầu tiên.
- Tiếp tục ấn lệnh Destination Ellipsoid. Trên màn hình, bạn sẽ chọn Choose; ấn Ellipsoid phù hợp (WGS84) và bấm OK.
- Trong mục Projection, chọn Projection, chọn hình chiếu UTM phù hợp. Sau đó, tiến hành chỉnh sửa các thông số tương thích: 500000 (False easting); 105.0 (Central meridian); 0.9999 (Scale) và nhấn OK.
- Tại mục 7-parameter ấn Open và chọn các thông số tương thích rồi nhấn OK.
- Tiếp đến tiến hành lưu System Parameter: Chọn Save as và chọn OK.
- Đến bước này, bạn bắt buộc phải bật TPI khi sử dụng tín hiệu trạm COR Cục bằng cách chọn Setting; ấn vào Project Options. Tại mục GENERAL, ấn chọn Plotting Scale và tiếp tục chọn Use RTC M1021- 1027; chọn OK để xác nhận.
- Cuối cùng, chọn Survey và chọn Point Survey trên bản đồ. Ấn Save để tiến hành đo.
Khách hàng tham khảo: Cách sử dụng máy toàn đạc trong trắc địa công trình

Đo tọa độ điểm
CHUYỂN ĐIỂM RA THỰC ĐỊA

Cần nắm rõ hướng dẫn sử dụng máy đo RTK trước khi tiến hành chuyển điểm ra thực địa
Đến bước này, để kết quả đo được chính xác, bạn sẽ tiến hành như sau:
- Đầu tiên, ấn chọn Survey, chọn Stakeout Pt (bản đồ các điểm xuất hiện); ấn Point và chọn lệnh Add. Khi đó, hộp thoại Add Pt sẽ xuất hiện. Lúc này bạn sẽ ấn chọn Get from database để tìm lại điểm vừa đo được trên máy.
- Tiếp đến, tại mục Coordinates, chọn điểm PT1 và ấn Import.
- Vào mục Point, chọn điểm PT1, tiếp tục ấn Point Stake out và di chuyển theo mũi tên đến vị trí lá cờ gần điểm PT1 nhất.
- Sau đó, tiếp tục đi theo chỉ dẫn để tới được điểm PT1 đã đo trước đó.
Như vậy, bước chuyển điểm ra thực địa đã hoàn thành chỉ với một vài thao tác nhỏ.
Hướng dẫn sử dụng nhanh máy định vị GPS RTK Trimble R8S GNSS

1. Đo lưới (Chế độ đo tĩnh, tĩnh nhanh)
Máy định vị GPS RTK Trimble R8S GNSS là thế hệ máy đo GPS 2 tần số, đo được cả ở chế độ RTK. Khi đo đạc ngoài thực địa với chế độ RTK, số liệu đo sẽ được lưu trên bộ điều khiển SLATE. Khi đo R8sLT GNSS với chế độ đo lưới, ta không cần sử dụng đến bộ điều khiển. Vì thế trước khi tiến hành tổ chức đo lưới, ta phải chắc chắn đã cài đặt máy định vị GPS RTK Trimble R8S GNSS lưu số liệu trực tiếp trên máy.
Với lần đầu tiên khởi động máy định vị GPS RTK Trimble R8S GNSS, sử dụng bộ điều khiển Slate kết nối và điều khiển máy R8s đo theo chế độ đo lưới (chú ý: lưu số liệu trên máy đo R8s).
Khi kết thúc ca đo ta nhấn nút nguồn trên máy R8s để lưu số liệu. Kể từ lúc này máy sẽ tự động luôn lưu số liệu đo trên bộ nhớ của máy, đo lưới ta không cần mang theo bộ điều khiển nữa.
Lưu ý: Khi đo RTK, máy R8s GNSS có thể chuyển về chế độ lưu dữ liệu trên bộ điều khiển nên tốt nhất ta nên kiểm tra lại công đoạn này trước mỗi lần tổ chức đo lưới.
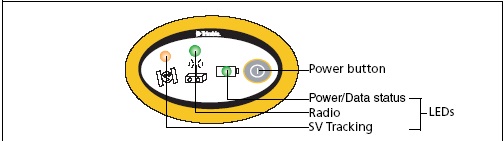
Cách kiểm tra rất đơn giản, đặt máy R8s ngoài trời, nhấn nút nguồn bật máy, cả 3 đèn đồng loạt sáng, sau đó đèn vệ tinh sẽ nháy chậm lại khi bắt đủ vệ tinh. Đèn nguồn (đèn ngoài cùng bên tay phải nếu ta đứng đối diện với máy) sẽ nháy nếu dữ liệu được ghi trực tiếp trên máy R8s. Nếu đèn nguồn không nháy tức là số liệu không được ghi vào bộ nhớ, ta đo vô ích vì không có dữ liệu đo khi trút.
* Các bước đo:
Máy định vị GPS RTK Trimble R8S GNSS đo tĩnh rất đơn giản. Nhấn phím nguồn để bật máy, đèn nguồn sáng, đèn vệ tinh sáng.
Sau 1 lúc dò tìm đủ số lượng vệ tinh cần thiết, đèn vệ tinh sẽ nháy đỏ chậm lại. Đèn nguồn màu xanh cũng nháy chậm chứng tỏ máy đang ghi dữ liệu vào bộ nhớ. Trạng thái đèn như vậy là máy đang hoạt động hoàn toàn bình thường.
Khi hết thời gian ca đo, ta giữ phím nguồn đến khi đèn vệ tinh tắt thì bỏ tay, sau mấy giây đèn nguồn cũng sẽ tắt. Di chuyển máy đến điểm mới rồi lặp lại quá trình đo tĩnh.
Trong quá trình đo ta nhớ ghi các thông tin cần thiết vào sổ đo như: tên điểm đo, thời gian bắt đầu, thời gian kết thúc; chiều cao Anten, kiểu đo cao anten.
* Trút số liệu đo:
Ở đây, tôi sẽ trình bày trút số liệu đo GPS của máy R8s GNSS bằng phần mềm “Data Transfer”.
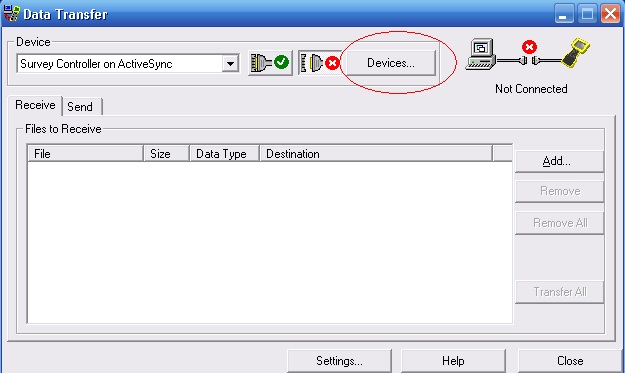
Kết nối máy định vị GPS RTK Trimble R8S GNSS với máy tính qua cổng Com. Mở giao diện làm việc của phần mềm “Data Transfer”. Ta phải khởi tạo 1 giao thức kết nối của máy R4GNSS bằng cách. Chọn thiết bị kết nối: nhấn “Devices”
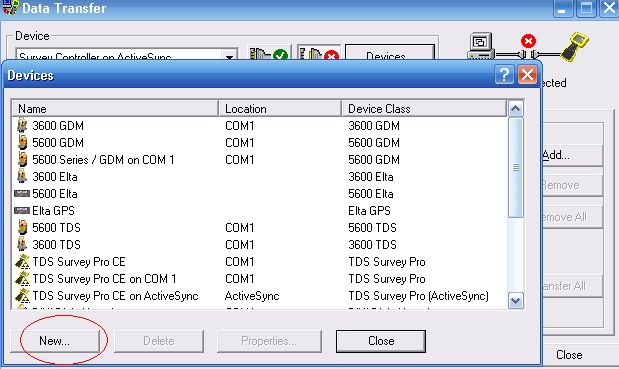
Tiếp đó, chọn “New”
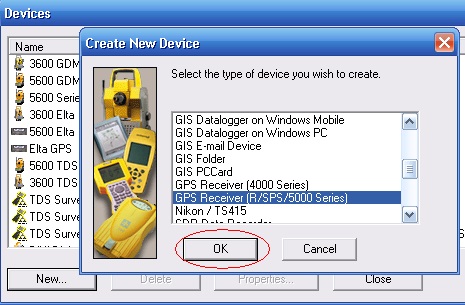
Trong hộp “Create New Device”
Chọn tới dòng “GPS Receiver (R/SPS/5000 Series)“, nhấp OK
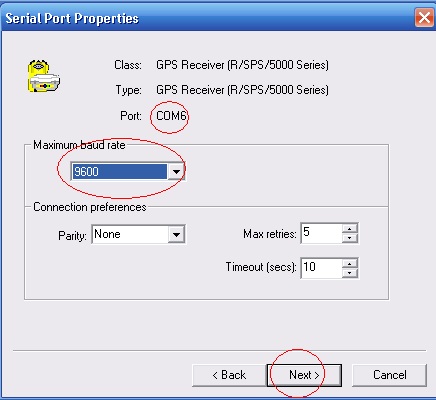
Bước tiếp theo, chọn cổng Com phù hợp (ở VD của tôi là cổng 6) rồi Next, đánh tên thiết bị kết nối. (VD: R8sLT). Chọn tốc độ truyền lớn nhất (ở đây VD là 115200), xong ấn Next và Finish
Đóng hộp Device, quay trở lại giao diện chính của “Data Transfer”

Trong ô Device ta chọn thiết bị R4 mà ta vừa khởi tạo, nhấn kết nối (biểu tượng dấu tích xanh, khoanh tròn trên hình). Khi kết nối thành công sẽ có biểu tượng Connected như trên hình VD. Nhấn “Add…” đề chọn số liệu cần trút.
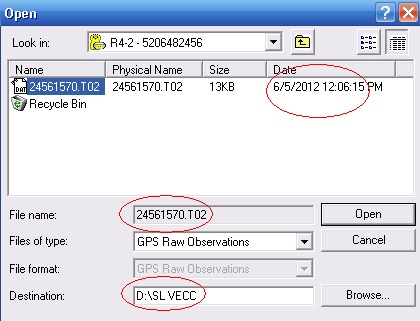
Chọn tên File số liệu cần trút, có thể xem và kiểm tra thời gian tạo file khớp với thời gian đo đạc. Chọn đường dẫn đến nơi cần lưu file số liệu, xong nhấp “Open”.
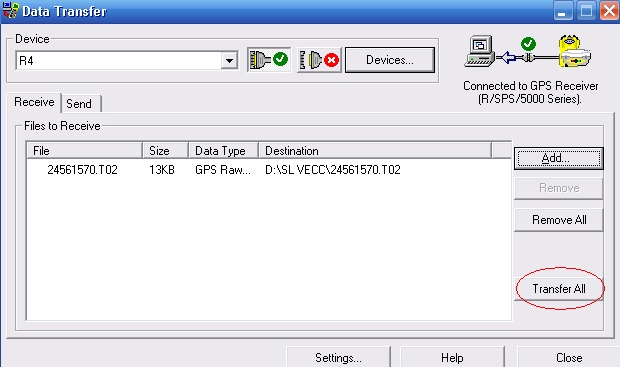
Sau khi chọn tên file cần trút và chọn đường dẫn để lưu file, ta nhấp “Transfer All” là hoàn thành.
2. Đo RTK (Đo động thời gian thực)
Đây có thể nói là chức năng đo tiện ích nhất của dòng máy GPS 2 tần số. Trong khuôn khổ của quyển hướng dẫn này, tôi xin được trình bày 1 bộ đo RTK rất phổ biến và không kém phần tiện lợi hiện nay. Bộ máy GPS R8sLT GNSS với điều khiển Slate sử dụng thêm bộ Radio phát ngoài TDL450H công suất 35W.
Việc đo đạc nói chung là đơn giản nhưng do số lượng thiết bị nhiều, lắp ráp qua nhiều công đoạn, tôi không có điều kiện đưa hình minh họa chi tiết như ở phần đo lưới nên ở đây tôi chỉ nói tổng quát, với những lưu ý mà ta hay vướng phải khiến việc đo đạc không như ý muốn để các bạn tiện tham khảo. Còn hướng dẫn chi tiết chắc phải hẹn các bạn khi thao tác trực tiếp trên máy đo.
*Các thiết bị cấu tạo nên bộ máy đo RTK hoàn chỉnh:
– 01 máy định vị GPS RTK Trimble R8S GNSS đóng vai trò là máy Base (Máy chủ). Máy đặt tại điểm gốc cố định.
– 01 hoặc 2 máy R2GNSS đóng vai trò là máy Rover(Máy di động). Máy đo điểm chi tiết.
– 01 Bộ điều khiển (TSC hoặc Slate) điều khiển máy Base và Rover.
– 01 Bộ phát Radio 35W (Hiện nay phổ biến nhất là TDL450H)
*Các bước tiến hành đo RTK
– Thiết lập Trạm Base: Lắp đặt trạm Base ở điểm gốc cố định. Định tâm chính xác máy R8s GNSS base trên đế máy dọi tâm.
Bật máy đo, kết nối bộ điều khiển với máy R8s GNSS Base qua Bluetooth. Nhập tên điểm đo, độ cao anten, kiểu đo cao anten.
Cắm cáp kết nối giữa bộ phát radio ngoài TDL450 với máy R8s GNSS Base.
Vào phần mềm đo đạc trong bộ điều khiển máy R8s GNSS để kích hoạt trạm Base.
– Thiết lập Trạm Rover: Máy đo R2GNSS Rover được lắp trên sào đo. Tiến hành bật máy đo và kết nối máy đo R2GNSS Rover với SLATE thông qua Bluetooth.
Máy đo R2GNSS được lắp anten UHF (anten đuôi chuột) để thu tín hiệu Radio cải chính phát ra từ trạm Base.
Sau khi kết nối với máy R2GNSS Rover, SLATE sẽ điều khiển máy đo lần lượt đo các điểm chi tiết.
Ngoài thực địa, tọa độ và độ cao của điểm đo chi tiết được xác định ngay tại thời điểm đo và ta có thể xem tọa độ này trực tiếp trên bộ điều khiển. Số liệu của tất cả các điểm chi tiết được lưu trên bộ điều khiển SLATE.
Ta có thể dễ dàng trút số liệu này trên các phần mềm xử lý số liệu của hãng Trimble phục vụ cho công tác tính toán và lưu trữ.
*Các lưu ý khi tiến hành đo RTK.
– Tần số phát Radio UHF cải chính của máy TDL450H đặt tại trạm Base phải trùng với tần số thu UHF của anten thu gắn trên máy R2GNSS Rover. Thông thường trong giải tần quy định của máy ta có thể chọn tần số 450; 460 hay 470MHz phù hợp.
Nguyên nhân trạm Base và trạm Rover không cùng tần số UHF thu phát là trường hợp phổ biến nhất khiến việc đo RTK bị trục trặc.
– Khi máy phát Radio ngoài TDL450H chỉ thu tín hiệu (Rx) mà không phát tín hiệu (Tx), lỗi là ở máy phát Radio ngoài, không phải tại máy Base hay Rover.
Người sử dụng nên liên hệ với nhà cung cấp để được hỗ trợ tốt nhất. Việc can thiệp vào tần số phát của TDL450H đòi hỏi nhà cung cấp can thiệp, người sử dụng rất khó chữa được lỗi này.
Trên đây là những điểm tổng quát nhất khi sử dụng hệ thống máy định vị GPS RTK Trimble R8S
Chúc các bạn thành công khi sử dụng thiết bị này!




