
Kiến thức trắc địa
Các khái niệm GNSS cơ bản
“Bất kỳ công nghệ đủ tiên tiến nào đều không thể phân biệt được với ma thuật.” Arthur C. Clarke, tác giả, nhà phát minh và nhà tương lai học người Anh.
Trong chương này, chúng tôi sẽ giới thiệu các khái niệm GNSS cơ bản. Chúng ta sẽ thảo luận về các khái niệm nâng cao hơn trong các chương tiếp theo.
GNSS thoạt nghe có vẻ giống như một phép thuật, nhưng bạn càng nghiên cứu và tìm hiểu về nó, nó càng trở nên đơn giản và trang nhã hơn. Khái niệm GNSS cơ bản thể hiện trong Hình 10, minh họa các bước liên quan đến việc sử dụng GNSS để xác định thời gian và vị trí thông qua ứng dụng người dùng cuối.
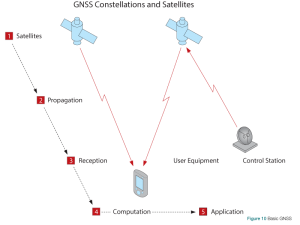
Bước 1-Vệ tinh: Vệ tinh GNSS quay quanh trái đất. Các vệ tinh biết rõ quỹ đạo của chúng (các thông số xác định quỹ đạo của chúng) và thời gian rất, rất chính xác. Các trạm điều khiển trên mặt đất điều chỉnh thời gian và thời gian phù du của vệ tinh khi cần thiết.
Bước 2 – Truyền bá: Các vệ tinh GNSS thường xuyên phát sóng thời gian và thời gian, cũng như trạng thái của chúng. Tín hiệu vô tuyến GNSS truyền qua các lớp của bầu khí quyển đến thiết bị của người dùng.
Bước 3 – Tiếp nhận: Thiết bị người dùng GNSS nhận tín hiệu từ nhiều vệ tinh GNSS, sau đó, đối với mỗi vệ tinh, khôi phục thông tin đã được truyền đi và xác định thời gian truyền, thời gian tín hiệu đi từ vệ tinh đến máy thu.
Bước 4 – Tính toán: Thiết bị người dùng GNSS sử dụng thông tin đã phục hồi để tính toán thời gian và vị trí.
Bước 5 – Ứng dụng: Thiết bị người dùng GNSS cung cấp vị trí và thời gian được tính toán cho ứng dụng người dùng cuối, ví dụ: điều hướng, khảo sát hoặc lập bản đồ.
Bước 1 – Vệ tinh
Có nhiều chòm sao vệ tinh GNSS quay quanh trái đất. Chòm sao chỉ đơn giản là một nhóm các vệ tinh có trật tự,

thường là 20-30, trong các quỹ đạo đã được thiết kế để cung cấp phạm vi phủ sóng mong muốn, ví dụ: khu vực hoặc toàn cầu. Chúng tôi sẽ cung cấp thêm chi tiết về các chòm sao GNSS trong Chương 3.
Vệ tinh GNSS quay quanh quỹ đạo cao hơn bầu khí quyển, khoảng 20.000 km so với bề mặt trái đất. Chúng đang di chuyển rất nhanh, vài km / giây.
Vệ tinh GNSS không nhỏ như bạn nghĩ. Thế hệ vệ tinh GPS mới nhất (Block IIF) nặng hơn 1.400 kg, hơn một chút so với trọng lượng của Volkswagen Beetle. Cơ thể của những vệ tinh này có kích thước 2,5 m x 2,0 m x 2,2 m. Hình 11 cho thấy hình ảnh phần thân của vệ tinh GPS Block IIR, để cho biết chúng lớn như thế nào.
Trong chân không tương đối của không gian, quỹ đạo vệ tinh rất ổn định và có thể dự đoán được. Như đã đề cập, vệ tinh GNSS biết thời gian và quỹ đạo của chúng rất chính xác. Nếu bạn hỏi vệ tinh GPS về thời gian, nó sẽ không cho bạn biết 8 giờ 30 phút. Nó sẽ cho bạn biết 8: 31.39875921.
Thế hệ vệ tinh GPS mới nhất sử dụng đồng hồ rubidi có độ chính xác trong khoảng ± 5 phần trong 10 11 . Những đồng hồ này được đồng bộ hóa bởi đồng hồ caesium dựa trên mặt đất hơn. Bạn sẽ cần phải theo dõi một trong những chiếc đồng hồ Cesium này trong hơn 100.000 năm để xem nó tăng hay giảm một giây. Để so sánh, nếu bạn có một chiếc đồng hồ thạch anh, nó có thể có độ chính xác là ± 5 phần trong 10 6 và sẽ mất khoảng một giây sau mỗi hai ngày.
Nhân tiện, nếu tất cả các máy thu GNSS cần một tiêu chuẩn rubidi, thì khả năng tồn tại của GNSS sẽ nhanh chóng sụp đổ. Ở phần sau của chương, chúng tôi sẽ mô tả cách thức trang nhã mà hệ thống GNSS “chuyển” độ chính xác của đồng hồ vệ tinh sang máy thu GNSS.
Bạn có thể tự hỏi tại sao thời gian lại là một vấn đề lớn như vậy trong hệ thống GNSS. Đó là bởi vì thời gian cần một tín hiệu GNSS để truyền từ vệ tinh đến máy thu được sử dụng để xác định khoảng cách (phạm vi) đến vệ tinh. Cần phải có độ chính xác vì sóng vô tuyến truyền với tốc độ ánh sáng. Trong một micro giây (một phần triệu giây), ánh sáng truyền đi 300 m. Trong một nano giây (một phần tỷ giây), ánh sáng truyền đi 30 cm. Sai sót nhỏ về thời gian có thể dẫn đến sai số lớn về vị trí.
GPS là chòm sao GNSS đầu tiên được đưa ra. Với chi phí 12 tỷ đô la Mỹ, nó là hệ thống định vị chính xác nhất trên thế giới. Chòm sao GLONASS của Nga cũng đã được phóng và đang hoạt động. Lợi ích đối với người dùng cuối khi có quyền truy cập vào nhiều chòm sao là tính dự phòng và tính khả dụng. Nếu một hệ thống bị lỗi, vì bất kỳ lý do gì, các máy thu GNSS, nếu chúng được trang bị để làm như vậy, có thể nhận và sử dụng tín hiệu từ các vệ tinh trong các hệ thống khác. Lỗi hệ thống không thường xuyên xảy ra, nhưng thật tuyệt khi biết rằng nếu nó xảy ra, bộ thu của bạn vẫn có thể hoạt động.
Dù vậy, việc truy cập vào nhiều chòm sao có lợi đặc biệt khi đường ngắm tới một số vệ tinh bị che khuất, như thường xảy ra ở các khu vực đô thị hoặc nhiều cây cối.
Quỹ đạo vệ tinh
Vệ tinh GNSS quay quanh quỹ đạo cao hơn bầu khí quyển của Trái đất. Vệ tinh GPS và GLONASS quay quanh quỹ đạo ở độ cao gần 20.000 km. Các vệ tinh BeiDou và Galileo quay quanh quỹ đạo cao hơn một chút, khoảng 21.500 km đối với BeiDou và 23.000 km đối với Galileo. Các quỹ đạo GNSS, ít hoặc nhiều tròn, và có độ ổn định cao và có thể dự đoán được, thuộc loại MEO, dành cho quỹ đạo trái đất trung bình.
Không có nhiều lực cản ở 20.000 km, nhưng hiệu ứng hấp dẫn và áp suất của bức xạ mặt trời có ảnh hưởng đến quỹ đạo GNSS một chút và quỹ đạo đôi khi phải được điều chỉnh. Trong khi quỹ đạo của nó đang được điều chỉnh, trạng thái của vệ tinh GNSS được thay đổi thành “không hoạt động” để thiết bị của người dùng biết không sử dụng các tín hiệu bị ảnh hưởng.
Tín hiệu vệ tinh
“Mọi thứ nên được làm đơn giản nhất có thể, nhưng không đơn giản hơn.” Albert Einstein. Tín hiệu vệ tinh GNSS rất phức tạp. Việc mô tả các tín hiệu này yêu cầu các từ phức tạp không kém như pseudorandom, tương quan và Đa truy cập phân chia theo mã (CDMA). Để giải thích các khái niệm GNSS này, trước tiên chúng ta hãy thảo luận về tín hiệu vệ tinh GPS.
Đầu tiên và quan trọng nhất, GPS được thiết kế như một hệ thống định vị cho Bộ Quốc phòng Hoa Kỳ. Để cung cấp thông tin vị trí có độ chính xác cao cho các ứng dụng quân sự, rất nhiều độ phức tạp đã được thiết kế vào hệ thống để đảm bảo an toàn và không bị gây nhiễu và can thiệp. Mặc dù các thành phần quân sự và dân sự của GPS là riêng biệt, một số công nghệ được sử dụng trong thành phần quân sự đã được áp dụng cho thành phần dân sự.
Kể từ khi nó đạt được khả năng hoạt động ban đầu vào tháng 12 năm 1993, GPS đã được cung cấp cho người dùng dân sự, những người có các yêu cầu khác nhau về tính khả dụng của dịch vụ, độ chính xác của định vị và chi phí.
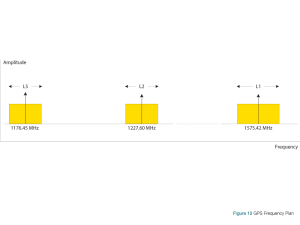
Các kế hoạch tần số (kế hoạch mô tả tần số, biên độ và độ rộng của tín hiệu) cho mỗi hệ thống GNSS là khác nhau một chút. Chúng tôi sẽ mô tả chi tiết hơn các kế hoạch này trong Chương 3. Để minh họa các khái niệm GNSS, tuy nhiên, chúng tôi sẽ mô tả ngắn gọn sơ đồ tần số và tín hiệu được sử dụng bởi GPS, được thể hiện trong Hình 12. Về mặt khái niệm, điều này không khác nhiều so với sơ đồ tần số cho các kênh truyền hình cáp hoặc truyền hình quảng bá.
Như trong Hình 12, các vệ tinh GPS truyền thông tin trên các tần số L1, L2 và L5. Bạn có thể hỏi, “Làm thế nào mà tất cả các vệ tinh GPS có thể truyền trên cùng một tần số?”
GPS hoạt động theo cách mà nó hoạt động do sơ đồ truyền dẫn mà nó sử dụng, được gọi là CDMA.
CDMA là một dạng của trải phổ. Các tín hiệu vệ tinh GPS, mặc dù chúng có cùng tần số, nhưng được điều chế bởi một chuỗi kỹ thuật số giả ngẫu nhiên duy nhất, hoặc mã. Mỗi vệ tinh sử dụng một mã giả ngẫu nhiên khác nhau. Pseudorandom có nghĩa là tín hiệu chỉ xuất hiện ngẫu nhiên; trên thực tế, nó thực sự lặp lại sau một khoảng thời gian. Người nhận biết mã giả cho từng vệ tinh. Điều này cho phép máy thu tương quan (đồng bộ hóa) với tín hiệu CDMA cho một vệ tinh cụ thể. Tín hiệu CDMA ở mức rất thấp, nhưng thông qua mối tương quan mã này, máy thu có thể khôi phục các tín hiệu và thông tin mà chúng chứa.
Để minh họa, hãy xem xét việc lắng nghe một người trong căn phòng đầy tiếng ồn. Nhiều cuộc trò chuyện đang diễn ra, nhưng mỗi cuộc trò chuyện bằng một ngôn ngữ khác nhau. Bạn có thể hiểu người đó bởi vì bạn biết ngôn ngữ họ đang nói. Nếu bạn là người đa ngôn ngữ, bạn sẽ có thể hiểu những gì người khác đang nói. CDMA là rất nhiều như thế này.
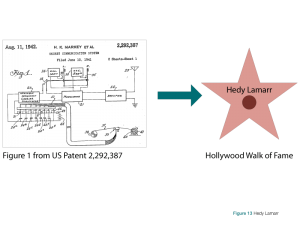
Bạn có thể muốn biết rằng Hedy Lamarr, nhà khoa học và nữ diễn viên người Mỹ gốc Áo, đã đồng phát minh ra một dạng công nghệ truyền thông trải phổ ban đầu. Vào ngày 11 tháng 8 năm 1942, cô và đồng nghiệp của mình, George Antheil, được cấp bằng sáng chế Hoa Kỳ 2.292.387. Thật không thể tin được, Lamarr đã chuyển sự nghiệp và tiếp tục làm 18 bộ phim từ năm 1940 đến năm 1949, nhưng những khái niệm được đề cập trong bằng sáng chế của cô đã góp phần vào sự phát triển của truyền thông trải phổ ngày nay.
GPS hoạt động trong một dải tần được gọi là L-Band, một phần của phổ vô tuyến từ 1 đến 2 GHz. L-Band được chọn vì một số lý do, bao gồm:
- Đơn giản hóa thiết kế ăng ten. Nếu tần số cao hơn nhiều, ăng-ten của người dùng có thể phải phức tạp hơn một chút.
- Độ trễ tầng điện ly có ý nghĩa hơn ở các tần số thấp hơn. Chúng ta sẽ nói thêm về độ trễ tầng điện ly trong Bước 2 – Sự lan truyền, ở phần sau của chương này.
- Ngoại trừ khi truyền qua chân không, tốc độ ánh sáng thấp hơn ở các tần số thấp hơn, bằng chứng là sự phân tách các màu trong ánh sáng bằng lăng kính. Bạn có thể nghĩ rằng tốc độ ánh sáng là một hằng số 299.792.458 mét / giây. Nó thực sự là 299.792.458 mét / giây trong chân không, nhưng trong không khí hoặc bất kỳ phương tiện nào khác, nó nhỏ hơn.
- Sơ đồ mã hóa yêu cầu một băng thông cao, không có sẵn trong mọi băng tần.
- Dải tần được chọn để giảm thiểu ảnh hưởng của thời tiết đối với việc truyền tín hiệu GPS.
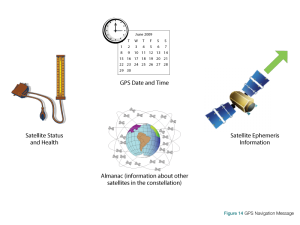
L1 truyền một thông điệp điều hướng, mã C / A thu thập thô (được cung cấp miễn phí cho công chúng) và một mã có độ chính xác được mã hóa (P), được gọi là mã P (Y) (truy cập hạn chế). Thông báo điều hướng là một thông báo tốc độ bit thấp bao gồm các thông tin sau:
- Ngày và giờ GPS.
- Tình trạng vệ tinh và sức khỏe. Nếu vệ tinh đang gặp sự cố hoặc quỹ đạo của nó đang được điều chỉnh, nó sẽ không thể sử dụng được. Khi điều này xảy ra, vệ tinh sẽ truyền thông điệp ngoài dịch vụ.
- Dữ liệu lịch thiên văn vệ tinh, cho phép máy thu tính toán vị trí của vệ tinh. Thông tin này chính xác đến rất nhiều chữ số thập phân. Người nhận có thể xác định chính xác vị trí của vệ tinh khi nó truyền thời gian.
- Almanac, chứa thông tin và trạng thái của tất cả các vệ tinh GPS, để người nhận biết vệ tinh nào có sẵn để theo dõi. Khi khởi động, người nhận sẽ khôi phục “niên giám” này. Niên giám bao gồm quỹ đạo thô và thông tin trạng thái cho mỗi vệ tinh trong chòm sao.
Mã P (Y) được sử dụng trong quân sự. Nó cung cấp khả năng loại bỏ nhiễu tốt hơn so với mã C / A, giúp GPS quân sự mạnh mẽ hơn GPS dân sự. Tần số L2 truyền mã P (Y) và trên các vệ tinh GPS mới hơn, nó cũng truyền mã C / A (gọi tắt là L2C), cung cấp mã công khai thứ hai cho người dùng dân sự. Mặc dù thông tin trong mã P (Y) không phải ai cũng có thể truy cập được, nhưng những người thông minh đã tìm ra cách sử dụng sóng mang và mã L2 mà không cần biết nó được mã hóa như thế nào.
Mặc dù sơ đồ truyền dẫn GPS phức tạp, nhưng nó đã được chọn vì nhiều lý do chính đáng:
- Máy thu GPS có thể khôi phục tín hiệu rất yếu bằng cách sử dụng ăng-ten rất nhỏ. Điều này giữ cho chi phí đầu thu thấp.
- Hoạt động đa tần số cho phép bù tầng điện ly, vì độ trễ tầng điện ly thay đổi theo tần số. Hệ thống GPS có khả năng chống nhiễu và gây nhiễu.
- Bảo vệ. Các tín hiệu được truy cập và sử dụng bởi các ứng dụng quân sự không thể truy cập được bởi dân thường. Các hệ thống GNSS khác về mặt khái niệm tương tự như GPS, nhưng có sự khác biệt. Chúng tôi sẽ cung cấp thêm thông tin về những khác biệt này trong Chương 3.
Lỗi vệ tinh
Lỗi vệ tinh bao gồm lỗi ephemeride và lỗi đồng hồ. Những sai số vệ tinh này rất, rất nhỏ, nhưng hãy nhớ rằng trong một nano giây, ánh sáng truyền đi 30 cm.
Thời gian tồn tại của vệ tinh
Vệ tinh GNSS không tồn tại mãi mãi. Đôi khi chúng bị loại bỏ dần với các mẫu mới hơn có tín hiệu mới hoặc cải thiện khả năng giữ thời gian. Đôi khi các vệ tinh GNSS bị lỗi và nếu chúng không thể khôi phục được, chúng sẽ bị xóa vĩnh viễn khỏi dịch vụ.
Chỉnh sửa vệ tinh
Các trạm Trái đất liên tục theo dõi các vệ tinh và thường xuyên điều chỉnh thông tin thời gian và quỹ đạo của chúng để giữ cho thông tin được phát đi này có độ chính xác cao. Nếu quỹ đạo của vệ tinh trôi ra ngoài giới hạn hoạt động, nó có thể bị đưa ra khỏi hoạt động và quỹ đạo của nó được điều chỉnh bằng cách sử dụng tên lửa đẩy nhỏ.
Trong minh họa từng bước của chúng tôi về GNSS, các tín hiệu vô tuyến đã rời khỏi ăng-ten vệ tinh và truyền đi trái đất với tốc độ ánh sáng.
Bước 2- Truyền tín hiệu
Các tín hiệu GNSS đi qua vùng gần chân không của không gian, sau đó xuyên qua các lớp khác nhau của khí quyển đến trái đất, như được minh họa trong Hình 15.
Để có được vị trí và thời gian chính xác, chúng ta cần biết độ dài của đường dẫn trực tiếp từ vệ tinh đến thiết bị của người dùng (mà chúng ta gọi là “phạm vi” tới vệ tinh). Như trong Hình 15,sóng vô tuyến không truyền theo đường thẳng. Ánh sáng chỉ truyền theo đường thẳng trong chân không hoặc truyền qua một môi trường hoàn toàn đồng nhất. Giống như một ống hút dường như bị “uốn cong” trong một cốc nước, tín hiệu vô tuyến từ vệ tinh bị bẻ cong khi chúng đi qua bầu khí quyển của trái đất. Sự “bẻ cong” này làm tăng thời gian tín hiệu truyền từ vệ tinh đến máy thu. Như chúng ta sẽ giải thích trong Bước 4, khoảng cách đến vệ tinh được tính bằng cách nhân thời gian truyền (mà bạn nhớ lại là thời gian tín hiệu truyền từ vệ tinh đến máy thu) với tốc độ ánh sáng. Sai số về thời gian lan truyền làm tăng hoặc giảm phạm vi tính toán tới vệ tinh. Ngẫu nhiên, vì phạm vi được tính toán có lỗi và không chính xác bằng phạm vi thực tế, chúng tôi gọi nó là “khoảng giả”.
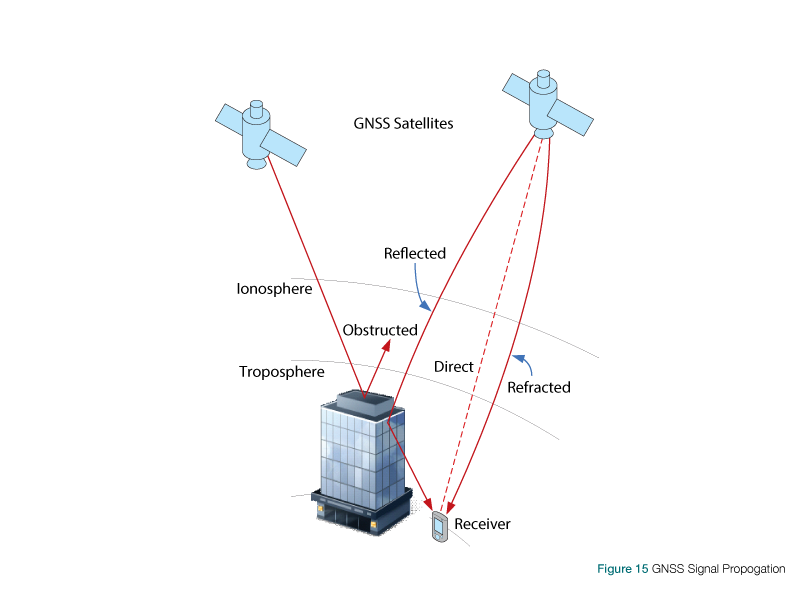
Tầng khí quyển ảnh hưởng nhiều nhất đến việc truyền tín hiệu GPS (và các tín hiệu GNSS khác) là tầng điện ly, tầng cao hơn bề mặt trái đất từ 70 đến 1.000 km. Tia tử ngoại từ mặt trời làm ion hóa các phân tử khí trong lớp này, giải phóng các điện tử tự do. Các electron này ảnh hưởng đến quá trình truyền sóng điện từ, bao gồm cả việc phát sóng tín hiệu vệ tinh GPS. Độ trễ tầng điện ly phụ thuộc vào tần số nên bằng cách tính toán phạm vi sử dụng cả L1 và L2, máy thu có thể loại bỏ hầu như ảnh hưởng của tầng điện ly.
Lớp khác của khí quyển có ảnh hưởng đến việc truyền tín hiệu GPS là tầng đối lưu, lớp thấp nhất của khí quyển Trái đất. Độ dày của tầng đối lưu khác nhau, khoảng 17 km ở vĩ độ trung bình, lên đến 20 km gần xích đạo và mỏng hơn ở các cực. Độ trễ đối lưu là một hàm của nhiệt độ cục bộ, áp suất và độ ẩm tương đối. L1 và L2 đều có độ trễ như nhau, do đó ảnh hưởng của độ trễ tầng đối lưu không thể được loại bỏ theo cách có thể có độ trễ tầng điện ly. Tuy nhiên, có thể lập mô hình tầng đối lưu sau đó dự đoán và bù đắp cho phần lớn sự chậm trễ.
Một phần năng lượng tín hiệu được truyền bởi vệ tinh bị phản xạ trên đường đến máy thu. Hiện tượng này được gọi là “lan truyền đa đường”. Các tín hiệu phản xạ này bị trễ so với tín hiệu trực tiếp và nếu chúng đủ mạnh, có thể gây nhiễu tín hiệu mong muốn. Các kỹ thuật đã được phát triển theo đó máy thu chỉ xem xét các tín hiệu đến sớm nhất và bỏ qua các tín hiệu đa đường, các tín hiệu đến muộn hơn. Trong những ngày đầu của GPS, hầu hết các lỗi đến từ độ trễ tầng điện ly và tầng đối lưu, nhưng hiện nay người ta đang chú ý nhiều hơn đến các hiệu ứng đa đường, vì lợi ích của việc liên tục cải thiện hiệu suất GNSS.
Bước 3 – Nhận tín hiệu
Như chúng tôi đã chỉ ra, máy thu cần ít nhất bốn vệ tinh để có được một vị trí. Việc sử dụng nhiều vệ tinh hơn, nếu chúng có sẵn, sẽ cải thiện giải pháp vị trí; tuy nhiên, khả năng sử dụng các vệ tinh bổ sung của máy thu có thể bị hạn chế bởi sức mạnh tính toán của nó. Cách thức mà người nhận sử dụng các phạm vi bổ sung nói chung sẽ là tài sản trí tuệ của nhà sản xuất.
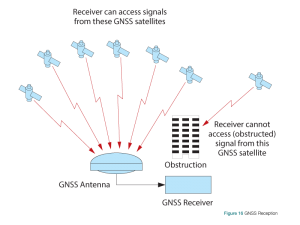
Tùy thuộc vào việc triển khai, thiết bị của người dùng có thể khôi phục tín hiệu từ nhiều vệ tinh trong nhiều chòm sao GNSS.
Để xác định vị trí và thời gian, máy thu GNSS cần có khả năng theo dõi ít nhất bốn vệ tinh. Điều này có nghĩa là cần phải có một đường ngắm giữa ăng-ten của máy thu và bốn vệ tinh.
Các máy thu khác nhau về việc chúng theo dõi chòm sao hoặc chòm sao nào và số lượng vệ tinh chúng theo dõi đồng thời.
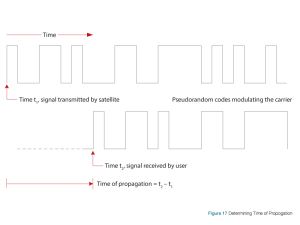
Đối với mỗi vệ tinh được theo dõi, máy thu sẽ xác định thời gian lan truyền. Nó có thể làm được điều này vì bản chất giả ngẫu nhiên của các tín hiệu. Để minh họa, hãy tham khảo Hình 17, cho thấy việc truyền một mã ngẫu nhiên giả, một chuỗi các số 0 và một. Vì máy thu biết mã giả ngẫu nhiên cho mỗi vệ tinh, nó có thể xác định thời gian nó nhận được mã từ một vệ tinh cụ thể. Bằng cách này, nó có thể xác định thời gian nhân giống.
Tầm quan trọng của việc lựa chọn ăng-ten
Một ăng-ten hoạt động như một bộ lọc không gian và tần số, do đó, việc lựa chọn ăng-ten GNSS phù hợp là rất quan trọng để tối ưu hóa hiệu suất. Ăng-ten phải phù hợp với khả năng và thông số kỹ thuật của máy thu, cũng như đáp ứng các thông số kỹ thuật về kích thước, trọng lượng, môi trường và cơ học cho ứng dụng dự kiến.
Các yếu tố cần xem xét khi chọn ăng-ten GNSS bao gồm:
1. Chòm sao và Tín hiệu
Mỗi chòm sao GNSS có tần số và băng thông tín hiệu riêng. Một ăng-ten phải bao phủ các tần số tín hiệu được truyền bởi chòm sao và băng thông được hỗ trợ bởi bộ thu GNSS.
2. Antenna tăng
Độ lợi là một chỉ số hiệu suất chính của ăng-ten GNSS. Độ lợi có thể được định nghĩa là số đo tương đối về khả năng định hướng hoặc tập trung năng lượng tần số vô tuyến của một ăng-ten theo một hướng hoặc mẫu cụ thể. Cần có một độ lợi tối thiểu để đạt được tỷ lệ sóng mang trên công suất-nhiễu tối thiểu (C / No) để theo dõi các vệ tinh GNSS. Độ lợi anten liên quan trực tiếp đến C / No tổng thể của các máy thu GNSS điều hướng. Do đó, độ lợi anten giúp xác định khả năng theo dõi của hệ thống.
3. Tăng nguyên tố
Độ lợi phần tử xác định mức độ hiệu quả của phần tử ăng-ten trong việc thu tín hiệu. Trong bất kỳ chuỗi tín hiệu nào, bạn chỉ tốt nhất là liên kết yếu nhất, vì vậy phần tử ăng ten có độ lợi phần tử thấp có thể được bù bằng độ lợi bộ khuếch đại nhiễu thấp tăng lên. Tuy nhiên, tỷ lệ tín hiệu trên nhiễu hoặc C / No bị suy giảm.
4. Antenna Beamwidth và Gain Roll-Off
Độ lợi cuộn tắt là một hệ số của độ rộng chùm tia và chỉ định độ lợi thay đổi bao nhiêu theo góc nâng của ăng-ten. Từ quan điểm của ăng-ten, các vệ tinh đi lên từ đường chân trời theo hướng thiên đỉnh và rơi trở lại đường chân trời. Sự thay đổi về độ lợi giữa đỉnh cao (trực tiếp trên không) và chân trời được gọi là độ lợi đạt được. Các công nghệ ăng ten khác nhau có các đặc tính cuộn tắt tăng ích khác nhau.
5. Sự ổn định của tâm pha
Tâm pha của anten là điểm thu tín hiệu truyền từ vệ tinh. Khi một máy thu báo cáo một vị trí đã được khắc phục, vị trí đó về cơ bản là tâm pha của ăng-ten.
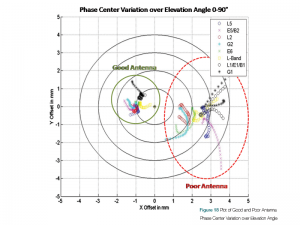
Tâm pha điện của bất kỳ ăng ten nào sẽ thay đổi theo vị trí của tín hiệu truyền mà nó đang nhận được chừng vài mm. Khi vệ tinh GNSS di chuyển trên bầu trời, tâm pha điện của tín hiệu nhận được thường sẽ di chuyển cùng với vị trí vệ tinh trừ khi ăng-ten được thiết kế cẩn thận để giảm thiểu độ lệch tâm pha (PCO) và độ lệch tâm pha (PCV). PCO, đối với Điểm tham chiếu ăng ten (ARP), là sự khác biệt giữa tâm cơ học của vòng quay ăng ten và vị trí trung tâm pha điện. PCO cũng phụ thuộc vào tần số, có nghĩa là có thể có một độ lệch khác nhau cho mỗi tần số tín hiệu. PCV xác định tâm pha di chuyển bao nhiêu so với góc nâng của vệ tinh.
Nhiều người dùng có thể chấp nhận độ chính xác nhỏ hơn một mét, do đó, các biến thể tâm pha nhỏ này gây ra sai số vị trí không đáng kể. Nhưng nếu bạn yêu cầu độ chính xác cao, chẳng hạn như máy thu Động học thời gian thực (RTK) có thể đạt được độ chính xác vị trí là 2-4 cm, một vài mm lỗi trung tâm pha có thể chuyển thành lỗi 10-15% ở vị trí được báo cáo. Đối với các ứng dụng khảo sát RTK, ăng ten cấp trắc địa cung cấp hiệu suất PCO / PCV vượt trội.
6. Ứng dụng
Ăng-ten phải đáp ứng các yêu cầu về hiệu suất, môi trường, cơ học và hoạt động của ứng dụng dự kiến. Ví dụ, ăng-ten GNSS được sử dụng cho các ứng dụng hàng không lý tưởng phải được chứng nhận TSO / FAA và đủ chắc chắn để xử lý nhiệt độ khắc nghiệt và cấu hình rung. Ăng-ten của máy khảo sát phải có thể tồn tại khi bị người khảo sát xử lý thô bao gồm cả việc rơi cột.
Bảng 1 nêu bật một số tính năng mong muốn quan trọng cần thiết cho ăng ten GNSS dựa trên ứng dụng của người dùng.
Sự khảo sát |
GIS |
Trạm tham chiếu |
Khảo sát Hàng không / Trên không |
Hàng hải |
Xây dựng / Khai thác |
Nông nghiệp chính xác |
Theo dõi xe |
Hoạt động Dock |
Máy bay không người lái |
Phương tiện không người lái |
Thời gian |
|
Cấu hình thấp |
• | • | • | • | ||||||||
PCO / PCV cực thấp |
• | • | ||||||||||
PCO / PCV thấp |
• | • | • | • | • | • | ||||||
Rung động cao |
• | • | • | • | • | • | ||||||
Gồ ghề |
• | • | • | • | • | |||||||
Tần số đơn |
• | |||||||||||
Đa Chòm sao |
• | • | • | • | • | • | • | • | • | • | ||
Đa tần số (RTK) |
• | • | • | • | • | • | • | • | • | |||
Tần số băng tần L (Dịch vụ hiệu chỉnh) |
• | • | ||||||||||
Băng thông hẹp |
• | |||||||||||
Thời tiết |
• | • | • | • | • | • | • | • | • | • | • | • |
Chống ăn mòn |
• | • | • | • | • | |||||||
Ngăn chặn đa đường cao |
• | • | • | • | • | • | • | |||||
Cực gắn kết |
• | • | • | • | • | • | • | |||||
Gắn kết từ tính / bề mặt |
• | • | • | • | • | |||||||
Chứng nhận TSO / FAA |
• | • | ||||||||||
Phạm vi nhiệt độ mở rộng |
• | • | • | |||||||||
Yếu tố hình thức nhỏ / Trọng lượng thấp |
• | • | ||||||||||
Hoạt động ở độ cao cao |
• | • | • |
Bước 4 – Tính toán
Nếu chúng ta biết vị trí chính xác của ba vệ tinh và phạm vi chính xác của mỗi vệ tinh, chúng ta sẽ có thể xác định vị trí của mình về mặt hình học. Chúng tôi đã đề xuất rằng chúng tôi cần phạm vi tới bốn vệ tinh để xác định vị trí. Trong phần này, chúng tôi sẽ giải thích lý do tại sao lại như vậy và cách định vị GNSS thực sự hoạt động.
Đối với mỗi vệ tinh đang được theo dõi, máy thu tính toán thời gian tín hiệu vệ tinh đến được nó, như sau:
Thời gian lan truyền = Tín hiệu thời gian đến được với máy
thu – Tín hiệu thời gian bên trái vệ tinh
Nhân thời gian lan truyền này với tốc độ ánh sáng sẽ cho khoảng cách tới vệ tinh.
Đối với mỗi vệ tinh đang được theo dõi, máy thu giờ đây biết vệ tinh đã ở đâu vào thời điểm truyền (vì vệ tinh phát sóng quỹ đạo của nó) và nó đã xác định khoảng cách đến vệ tinh khi nó ở đó. Sử dụng phép trilateration, một phương pháp xác định hình học vị trí của một vật thể, theo cách tương tự như phương pháp tam giác, máy thu tính toán vị trí của nó.
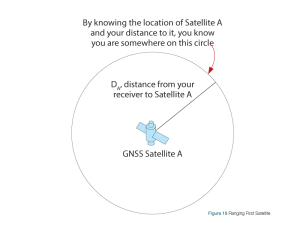
Để giúp chúng tôi hiểu về trilateration, chúng tôi sẽ trình bày kỹ thuật này theo hai chiều. Máy thu tính toán phạm vi của nó tới Vệ tinh A. Như chúng ta đã đề cập, nó thực hiện điều này bằng cách xác định khoảng thời gian để tín hiệu từ Vệ tinh A đến máy thu và nhân thời gian này với tốc độ ánh sáng. Vệ tinh A đã thông báo vị trí của nó (được xác định từ quỹ đạo vệ tinh và thời gian) với máy thu, do đó máy thu biết nó đang ở đâu đó trên một vòng tròn có bán kính bằng phạm vi và tập trung tại vị trí của Vệ tinh A, như minh họa trong Hình 19. Trong không gian ba chiều, chúng tôi sẽ hiển thị phạm vi dưới dạng hình cầu, không phải hình tròn.
Máy thu cũng xác định phạm vi của nó tới vệ tinh thứ hai, Vệ tinh B. Bây giờ máy thu biết nó nằm ở giao điểm của hai vòng tròn, tại Vị trí 1 hoặc 2, như thể hiện trong Hình 20.
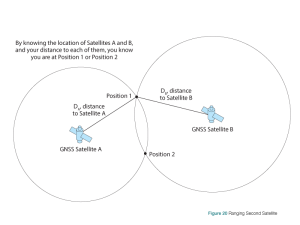
Bạn có thể bị cám dỗ để kết luận rằng việc mở rộng đến vệ tinh thứ ba sẽ được yêu cầu để giải quyết vị trí của bạn đến Vị trí 1 hoặc Vị trí 2. Nhưng một trong những vị trí thường có thể bị loại bỏ là không khả thi bởi vì, ví dụ, nó nằm trong không gian hoặc trong giữa Trái đất. Bạn cũng có thể muốn mở rộng hình minh họa của chúng tôi thành ba chiều và đề xuất rằng chỉ cần ba phạm vi để định vị.
Nhưng như chúng ta đã thảo luận trước đó, bốn phạm vi là cần thiết. Tại sao thế này?
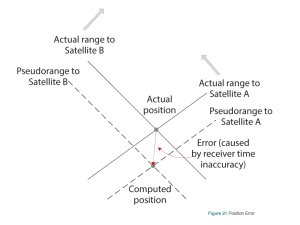
Nó chỉ ra rằng đồng hồ của máy thu gần như không chính xác bằng đồng hồ trên vệ tinh. Hầu hết đều dựa trên tinh thể thạch anh. Hãy nhớ rằng, chúng tôi đã nói những chiếc đồng hồ này chỉ chính xác khoảng 5 phần triệu. Nếu chúng ta nhân điều này với tốc độ ánh sáng, nó sẽ dẫn đến độ chính xác là ± 1500 mét. Khi chúng tôi xác định phạm vi đến hai vệ tinh, vị trí tính toán của chúng tôi sẽ bị lệch một lượng tỷ lệ với độ không chính xác trong đồng hồ máy thu của chúng tôi, như được minh họa trong Hình 21.
Chúng tôi muốn xác định vị trí thực tế của mình nhưng, như trong Hình 21, sự không chính xác về thời gian của máy thu gây ra sai số phạm vi dẫn đến lỗi vị trí. Người nhận biết có lỗi, nó chỉ không biết kích thước của lỗi. Nếu bây giờ chúng ta tính toán phạm vi cho vệ tinh thứ ba, nó sẽ không giao nhau với vị trí đã tính, như thể hiện trong Hình 22.
Bây giờ là một trong những kỹ thuật khéo léo được sử dụng trong định vị GNSS.
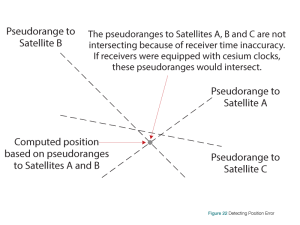
Máy thu biết rằng lý do các điểm giả của ba vệ tinh không giao nhau là do đồng hồ của nó không tốt lắm. Máy thu được lập trình để tăng hoặc trì hoãn đồng hồ của nó cho đến khi các điểm giả của ba vệ tinh hội tụ tại một điểm duy nhất, như thể hiện trong Hình 23.
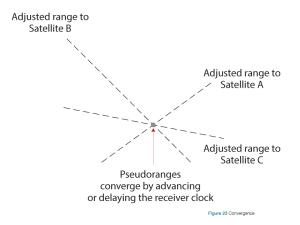
Độ chính xác đáng kinh ngạc của đồng hồ vệ tinh giờ đây đã được “chuyển” sang đồng hồ máy thu, loại bỏ lỗi đồng hồ máy thu trong việc xác định vị trí. Máy thu giờ đây có cả vị trí chính xác và thời gian rất, rất chính xác. Điều này mang lại cơ hội cho một loạt các ứng dụng, như chúng ta sẽ thảo luận.
Kỹ thuật trên cho thấy làm thế nào, trong biểu diễn hai chiều, độ chính xác về thời gian của máy thu có thể được loại bỏ và xác định vị trí bằng cách sử dụng phạm vi đến ba vệ tinh. Khi chúng tôi mở rộng kỹ thuật này sang ba chiều, chúng tôi cần thêm một phạm vi cho vệ tinh thứ tư. Đây là lý do tại sao cần có đường ngắm tối thiểu bốn vệ tinh GNSS để xác định vị trí.
Nguồn lỗi GNSS
Máy thu GNSS tính toán vị trí dựa trên dữ liệu nhận được từ vệ tinh. Tuy nhiên, có rất nhiều nguồn sai sót nếu không được sửa chữa sẽ khiến việc tính toán vị trí không chính xác. Một số lỗi trong số này, chẳng hạn như lỗi gây ra bởi sự khúc xạ của tín hiệu vệ tinh khi nó đi qua tầng điện ly và tầng đối lưu, là do các nguyên nhân tự nhiên và một số, chẳng hạn như phương pháp Tính sẵn sàng có chọn lọc (SA) của chính phủ, được đưa ra có chủ đích.
Loại sai số và cách giảm thiểu lỗi là điều cần thiết để tính toán vị trí chính xác, vì mức độ chính xác chỉ hữu ích trong phạm vi mà phép đo có thể tin cậy được. Cuốn sách này dành ba chương cho chủ đề quan trọng này. Chương 4 trình bày các nguồn chính của lỗi GNSS trong khi Chương 5 thảo luận về các phương pháp giải quyết lỗi và tác động đến độ chính xác và các yếu tố hiệu suất khác. Chương 8 trình bày các thiết bị và cơ sở hạ tầng mạng cần thiết để tạo và nhận dữ liệu hiệu chỉnh.
Pha loãng độ chính xác (DOP)
Sự sắp xếp hình học của các vệ tinh, khi chúng được trình bày cho máy thu, ảnh hưởng đến độ chính xác của các phép tính vị trí và thời gian. Lý tưởng nhất là máy thu sẽ được thiết kế để sử dụng tín hiệu từ các vệ tinh có sẵn theo cách giảm thiểu điều này được gọi là “pha loãng độ chính xác”.
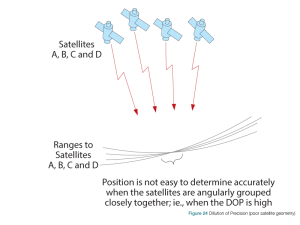
Để minh họa DOP, hãy xem xét ví dụ trong Hình 24, trong đó các vệ tinh đang được theo dõi được tập trung trong một vùng nhỏ của bầu trời. Như bạn có thể thấy, rất khó để xác định vị trí các phạm vi giao nhau. Vị trí được “trải rộng” trên khu vực của các giao lộ trong phạm vi, một khu vực được mở rộng bởi sự không chính xác của phạm vi (có thể được xem như là sự “dày lên” của các đường phạm vi).
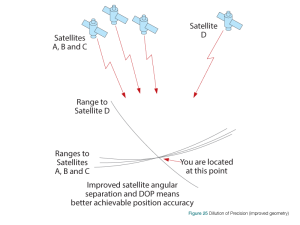
Như thể hiện trong Hình 25, việc bổ sung phép đo phạm vi cho một vệ tinh được tách một góc khỏi cụm cho phép chúng ta xác định một cách chính xác hơn.
Mặc dù nó được tính toán bằng các phương pháp thống kê phức tạp, chúng ta có thể nói như sau về DOP: DOP là một đại diện số của hình học vệ tinh, và nó phụ thuộc vào vị trí của các vệ tinh mà máy thu có thể nhìn thấy.
Giá trị DOP càng nhỏ thì kết quả của phép tính thời gian hoặc vị trí càng chính xác. Mối quan hệ được thể hiện trong công thức sau:
Đo lường vị trí không chính xác =
DOP x Không chính xác đo phạm vi
Vì vậy, nếu DOP rất cao, độ không chính xác của phép đo vị trí sẽ lớn hơn nhiều so với độ không chính xác của phép đo phạm vi.
- DOP có thể được sử dụng làm cơ sở để lựa chọn các vệ tinh mà giải pháp vị trí sẽ dựa trên đó; cụ thể là chọn vệ tinh để giảm thiểu DOP cho một ứng dụng cụ thể.
- DOP trên 6 dẫn đến độ chính xác không thể chấp nhận được cho các hoạt động DGNSS và RTK.
- DOP thay đổi theo thời gian trong ngày và vị trí địa lý, nhưng đối với một vị trí cố định, sự trình bày hình học của các vệ tinh lặp lại hàng ngày, đối với GNSS.
- DOP có thể được tính toán mà không cần xác định phạm vi. Tất cả những gì cần thiết là vị trí vệ tinh và vị trí máy thu gần đúng.
DOP có thể được biểu thị bằng một số phần tử riêng biệt xác định DOP cho một loại phép đo cụ thể, ví dụ, HDOP (Pha loãng theo chiều ngang của độ chính xác), VDOP (Pha loãng theo chiều dọc của độ chính xác) và PDOP (Pha loãng vị trí của độ chính xác). Các yếu tố này có liên quan về mặt toán học. Trong một số trường hợp, ví dụ khi vệ tinh ở trên bầu trời thấp, HDOP thấp và do đó có thể xác định tốt đến xuất sắc vị trí nằm ngang (vĩ độ và kinh độ), nhưng VDOP có thể chỉ đủ để xác định độ cao vừa phải. . Tương tự như vậy, khi các vệ tinh tập trung cao trên bầu trời, VDOP tốt hơn HDOP.
Ở Canada và ở các quốc gia khác ở vĩ độ cao, vệ tinh GNSS ở trên bầu trời thấp hơn và đạt được DOP tối ưu cho một số ứng dụng, đặc biệt là những nơi yêu cầu VDOP tốt, đôi khi là một thách thức.
Các ứng dụng trong đó các vệ tinh có sẵn ở vị trí thấp hoặc phân cụm góc cạnh, chẳng hạn như các vệ tinh trong môi trường đô thị hoặc khai thác mỏ lộ thiên sâu, có thể khiến người dùng gặp phải những cạm bẫy của DOP. Nếu bạn biết ứng dụng của mình sẽ có các điều kiện bị cản trở, bạn có thể muốn sử dụng công cụ lập kế hoạch nhiệm vụ để xác định thời gian lý tưởng — thời gian với DOP lý tưởng.
Bước 5 – Ứng dụng
Khi các lỗi đã được tính đến trong phương trình GNSS, bộ thu có thể xác định vị trí và thời gian của nó, và chuyển thông tin này đến ứng dụng người dùng cuối. Thị trường công nghệ GNSS là một ngành công nghiệp phổ biến, trị giá hàng tỷ đô la. Các ứng dụng bao gồm từ công cụ hỗ trợ điều hướng cấp mét cầm tay đơn giản, đến các giải pháp định vị mạnh mẽ, cấp độ centimet cho khảo sát, không người lái và quân sự. Với người dùng yêu cầu chức năng định vị GNSS trong môi trường ngày càng thách thức, công nghệ GNSS đang được tích hợp với các cảm biến khác như công nghệ quán tính để nâng cao khả năng định vị và độ tin cậy. Chúng ta xem xét nhiều loại cảm biến trong Chương 6.
Khi các ứng dụng trở nên phức tạp hơn và phổ biến hơn, cơ hội cho các kịch bản bị từ chối GNSS, dù là cố ý hay vô ý, sẽ tăng lên. Chương 7 thảo luận về nguyên nhân và các kỹ thuật giảm thiểu của việc từ chối GNSS như gây nhiễu và giả mạo. Chương cuối cùng của chúng tôi, Chương 8 hứa hẹn sẽ truyền cảm hứng với một số ứng dụng khách hàng thú vị nhất của chúng tôi.
Đóng nhận xét
Đây là một chương khó và chúng tôi rất vui vì bạn đã kiên trì thông qua các khái niệm cơ bản về định vị GNSS. Chương 3 cung cấp thông tin bổ sung về các chòm sao GNSS đã được thực hiện hoặc được lên kế hoạch. Chương 4, 5, 6 và 7 thảo luận về các khái niệm GNSS nâng cao, và Chương 8 thảo luận về thiết bị và ứng dụng — cách các đầu ra đơn giản của công nghệ đáng kinh ngạc này đang được sử dụng.




