Kiến thức trắc địa, Tư vấn
Những cải tiến ngày càng tăng của máy định vị RTk GPS – GNSS
Gần như không thể tưởng tượng được thông tin địa lý mà không có máy đinh vị RTK GPS GNSS ngày nay. Thậm chí hầu hết các dịch vụ trắc địa đã chuyển sang máy đinh vị RTK GNSS để duy trì mạng tham chiếu trắc địa hơn là sử dụng các kỹ thuật quang học truyền thống. Bài viết này khám phá hiện trạng của GNSS, từ cả góc độ chòm sao, phần tăng và phần thu. Cảnh báo spoiler: đó là một sự tiến hóa hơn là một cuộc cách mạng!
Hệ thống định vị vệ tinh toàn cầu (GNSS) có ở khắp mọi nơi. Nếu bạn cố gắng tưởng tượng thông tin địa lý mà không có GNSS, bạn có thể sẽ thất bại. Một số người có thể nói: ‘Nhưng còn máy toàn đạc của tôi thì sao?’. Nhưng có lẽ họ đang quên rằng hầu hết các dịch vụ trắc địa từ lâu đã ngừng khảo sát các điểm kiểm soát bằng các kỹ thuật quang học, truyền thống và thay vào đó đã chuyển sang GNSS để duy trì mạng tham chiếu trắc địa. Vậy trạng thái chơi hiện tại khi nói đến GNSS là gì?
Tham khảo: Các dòng máy định vị RTK
Số lượng các chòm sao GNSS không thay đổi trong vài năm qua. Được liệt kê theo thứ tự mà chúng lần đầu tiên đi vào hoạt động hoàn toàn trong cấu hình hiện tại, đó là: GPS của Hoa Kỳ, Glonass của Nga, Beidou của Trung Quốc và Galileo của châu Âu. Trên thực tế, Galileo không nên được đưa vào nếu đây là danh sách các hệ thống hoạt động hoàn chỉnh, vì – tại thời điểm viết bài – chỉ có 21 trong số 27 vệ tinh được lên kế hoạch cộng với 3 vệ tinh là có thể sử dụng được hoàn toàn, còn hai vệ tinh khác đang trong giai đoạn vận hành. Hy vọng rằng Galileo cũng sẽ đạt được trạng thái hoạt động đầy đủ vào một thời điểm nào đó vào năm 2022.
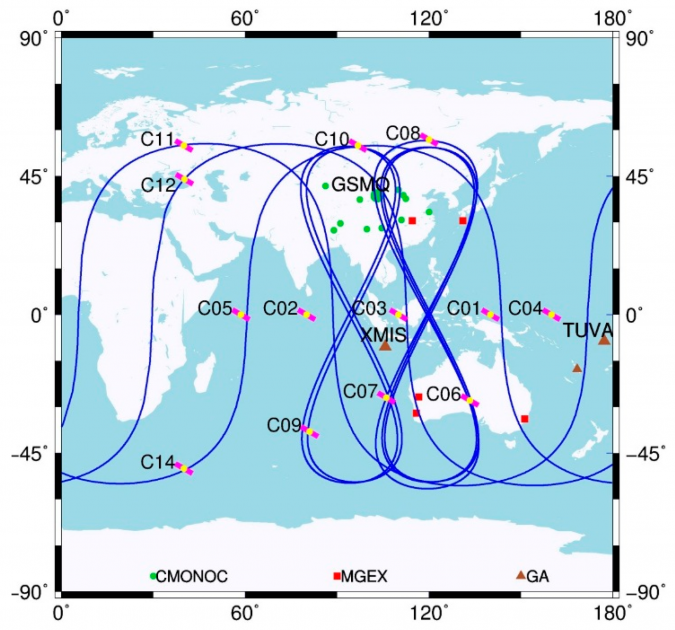
Bên cạnh bốn hệ thống vệ tinh dẫn đường toàn cầu này, còn có hai hệ thống khu vực. QZSS của Nhật có lẽ là cái được biết đến nhiều nhất; với cả vệ tinh không đồng bộ địa tĩnh và bán thiên hà, hệ thống cung cấp vùng phủ sóng của Nhật Bản. Ba vệ tinh khác được lên kế hoạch cho QZSS vào năm 2023, đưa chòm sao này lên thành bảy vệ tinh sẽ cung cấp khả năng định vị trên Nhật Bản (và Úc). Hệ thống khu vực thứ hai là NavIC (hay IRNSS, như nó đã được biết đến cho đến năm 2016), quay quanh Ấn Độ. Một lần nữa với cả vệ tinh địa tĩnh và địa đồng bộ, hệ thống này bao phủ Ấn Độ và Ấn Độ Dương. Vì cả QZSS và NavIC hoàn toàn là khu vực, chúng không thể được sử dụng bên ngoài khu vực cụ thể của họ. Điều này hoàn toàn trái ngược với GNSS ‘thực sự’, mặc dù Beidou thực sự là cả khu vực và toàn cầu; hệ thống sử dụng các vệ tinh địa tĩnh và địa đồng bộ ở Trung Quốc, cũng như các vệ tinh quay quanh thế giới theo quỹ đạo Trái đất trung bình như ba GNSS khác. Ưu điểm của điều này là phạm vi phủ sóng được cải thiện đáng kể so với Trung Quốc (và Úc). Do đó, những người có phạm vi bảo hiểm GNSS tốt nhất trên thế giới có lẽ là người Úc, với tổng cộng năm hệ thống có sẵn. Ấn Độ cũng có thể sử dụng năm hệ thống để điều hướng, mặc dù nước này gần với vùng phủ sóng của Beidou hơn.
GNSS tăng cường
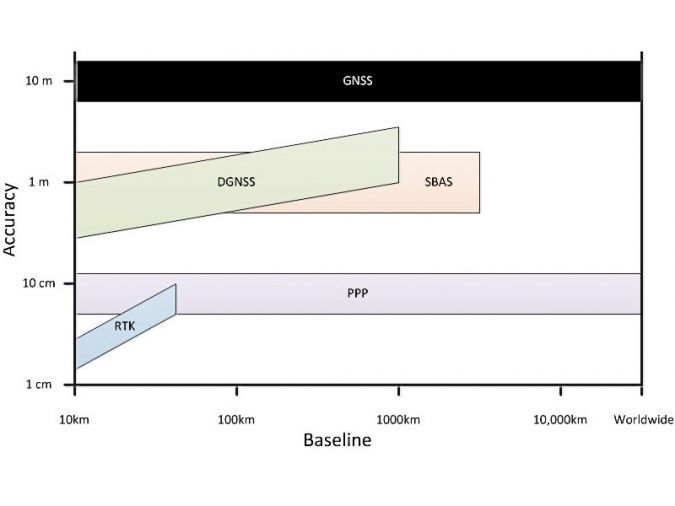
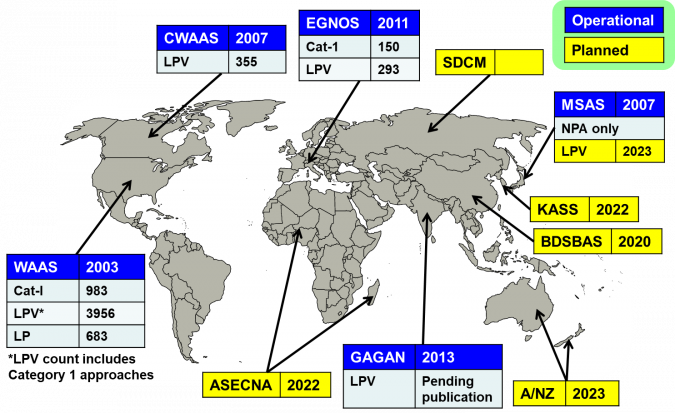
Cho dù để khảo sát và thông tin địa lý chuyên nghiệp khác hoạt động trên điện thoại thông minh hay trên xe cộ, và cho dù ở Hoa Kỳ, Châu Âu hay Châu Á, thì hiếm khi tín hiệu GNSS ‘thô’ được sử dụng, mà là một tín hiệu được cải thiện, tăng cường. Điều này là nhờ vào một số hệ thống nâng cấp dựa trên không gian ‘miễn phí’ (tức là do chính phủ tài trợ) (SBAS): WAAS ở Hoa Kỳ, MSAS ở Nhật Bản, Egnos ở Châu Âu và Gagan ở Ấn Độ. Các hệ thống khác đang ở các giai đoạn phát triển hoặc chứng nhận khác nhau, bao gồm SDCM (Nga), KASS (Hàn Quốc), BDSBAS (Trung Quốc), NamPAN (Úc), SACCSA (Nam / Trung Mỹ và Caribe) và A-SBAS (Châu Phi Xích đạo) . Mỗi hệ thống này về cơ bản hoạt động theo cùng một cách. Các trạm điều khiển (‘cơ sở’) trên mặt đất nhận các tín hiệu định vị vệ tinh và so sánh các tín hiệu thực sự nhận được với các tín hiệu dự kiến. Dựa trên một số phép đo này, một tập hợp các hiệu chỉnh cho vùng nâng được phát triển và truyền tới vệ tinh địa tĩnh, từ đó chúng được gửi trở lại máy thu trong các dải tần GNSS. Các vệ tinh này thường được nhận biết trên bầu trời bằng số vệ tinh ‘cao’ mà chúng hiển thị.
Do SBAS bao phủ các khu vực khá lớn nên độ chính xác của kết quả là hợp lý nhưng không quá cao. Khi yêu cầu độ chính xác cao theo chiều ngang và chiều dọc trong khảo sát đất, hệ thống động học hoặc tăng RTK thời gian thực được sử dụng. Ví dụ, tùy thuộc vào cách thiết lập, người khảo sát có thể sử dụng trạm gốc của riêng họ với các hiệu chỉnh UHF hoặc sử dụng mạng hiện có. Nếu một mạng hiện có được sử dụng, họ có thể sử dụng các hiệu chỉnh từ một cơ sở duy nhất – nhưng thông thường, chúng sử dụng một trạm tham chiếu ảo theo đó mạng ‘tính toán’ một tập hợp các hiệu chỉnh như thể trạm gốc được đặt tại hoặc gần khu vực khảo sát. Khi sử dụng trạm gốc của chính mình và xử lý hậu kỳ kết quả (thay vì sử dụng chúng trong thời gian thực), thậm chí có thể đạt được độ chính xác đến từng centimet. Nhược điểm của RTK là phạm vi bị giới hạn trong khoảng 15 km từ một trạm gốc (ảo). Do đó, việc sử dụng RTK có thể gặp vấn đề, đặc biệt là ở những vùng sâu vùng xa với cơ sở hạ tầng thông tin liên lạc hoặc trắc địa hạn chế.
Định vị điểm chính xác (PPP) nằm ở đâu đó giữa hai công nghệ này. Mặc dù nó không chính xác như RTK, nhưng ưu điểm của PPP là nó hoạt động trên các khu vực rộng lớn mà không cần phải lắp đặt trạm gốc của riêng mình. Trong PPP, dữ liệu từ các trạm trên mặt đất được sử dụng để mô hình hóa các lỗi cục bộ trong các quan sát GNSS (thay vì truyền các hiệu chỉnh). Sử dụng quy trình lặp đi lặp lại để dự đoán lỗi mô hình và so sánh chúng với kết quả thực, bộ thu lặp lại định vị độc lập với độ chính xác cao. Một liên kết dữ liệu vẫn được yêu cầu để nhận dữ liệu mô hình, nhưng phương pháp này không bị giới hạn bởi phạm vi chỉ vài km hoặc nhu cầu có các điểm tham chiếu cục bộ.
Dịch vụ có độ chính xác cao của Galileo cũng dựa trên nguyên tắc tương tự, nhưng với độ chính xác theo chiều ngang là khoảng 20cm và độ chính xác theo chiều dọc là khoảng 40cm. Dịch vụ này dự kiến sẽ bắt đầu hoạt động vào năm 2022 và đi vào hoạt động đầy đủ từ năm 2024 trở đi. Đối với các điểm đơn lẻ, các kết quả tương tự như các hệ thống PPP thương mại thường có thể thu được (nhưng không có bảo đảm) bằng các dịch vụ xử lý sau có sẵn miễn phí khác nhau như Auspos CSRS-PPP và Trimble CenterPoint RTX Post-Processing. Tùy thuộc vào dịch vụ, thậm chí có thể xử lý dữ liệu động học sau xử lý thay vì chỉ dữ liệu tĩnh.

Máy thu GNSS
Cũng như với tất cả phần cứng, bộ thu GNSS liên tục được phát triển thêm. Tuy nhiên, dựa trên các thông số kỹ thuật gần đây, rõ ràng là sự phát triển này là một sự tiến hóa hơn là một cuộc cách mạng. Có lẽ thay đổi lớn nhất đối với bộ thu GNSS là việc bổ sung một IMU, cho phép người dùng giữ cực ‘ở một góc’ trong khi đo. Mặc dù điều này tạo ra một lỗi bổ sung từ IMU, nhưng nó cho phép người dùng thực hiện các cuộc khảo sát ở những nơi khó tiếp cận. Hơn nữa, nếu không yêu cầu độ chính xác cao nhất, các cuộc khảo sát cũng có thể được hoàn thành nhanh hơn nhiều vì người dùng không còn cần phải đợi bong bóng chính giữa trước khi thực hiện phép đo. Tùy thuộc vào thương hiệu và kiểu máy thu, các góc có thể đạt được nằm trong khoảng từ 15 ° đến 60 ° nghiêng.
Không cần phải nói, bước phát triển lớn thứ hai là các đơn vị ngày càng nhỏ hơn để sử dụng trên các phương tiện bay không người lái (UAV hoặc ‘máy bay không người lái’). Trong khi động học sau xử lý trên máy bay không người lái có thể được coi là một lợi ích cách đây vài năm, thì ngày nay các hệ thống RTK đa tần số đang bắt đầu trở thành tiêu chuẩn cho các hệ thống cao cấp. Xu hướng này cho phép các nhà khảo sát có được các mô hình tốt hơn nhiều mà không yêu cầu nhiều điểm kiểm soát mặt đất để buộc các bức ảnh vào mạng lưới trắc địa.
Kết luận
Như đã trình bày ở trên, đã có những thay đổi gia tăng trong việc định vị GNSS trong vài năm qua. Với các chòm sao GNSS ngày càng phát triển, những phát triển hơn nữa trong hệ thống tăng cường và nâng cấp cho máy thu, mọi thứ dường như sẽ tiếp tục được cải thiện trong tương lai (gần).